Автоматизация Теория автоматизации Системы автоматизации Механизм автоматизации Проектирование автоматизации Использование автоматизация Управление автоматизацией Автоматизация - САПР Автоматизация - практика Автоматизация - софт |

|
Т. Я. Лазарева, Ю. Ф. Мартемьянов - Линейные системы автоматического регулирования
Допущено Учебно-методическим объединением вузов по образованию в области автоматизированного машиностроения. (УМО AM) в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлениям "Технология, оборудование и автоматизация машиностроительных производств" и специальностям: "Технология машиностроения"; "Металлорежущие станки и инструменты "; "Инструментальные системы интегрированных машиностроительных производств" (направление подготовки дипломированных специалистов -"Конструкторско-технологическое обеспечение машиностроительных производств"); "Автоматизация технологических процессов и производств (в машиностроении)" (направление подготовки дипломированных специалистов - "Автоматизированные технологии и производства ")
ВВЕДЕНИЕ
Теория автоматического управления является основной общепрофессиональной дисциплиной направления подготовки дипломированного специалиста "Автоматизированные технологии и производства".
Основной целью автоматизации является исключение непосредственного участия человека в управлении производственными процессами и другими техническими объектами. В настоящее время автоматизация технологических процессов представляет собой одно из важнейших средств роста эффективности производства, интенсификации развития народного хозяйства. Таким образом, задача изучения дисциплины "Теория автоматического управления" состоит в изучении основных принципов построения и функционирования автоматических систем управления на базе современных математических методов и технических средств.
Для изучения теории автоматического управления должен применяться системный подход, требующий рассмотрения системы в ее целостности, а не просто учета факторов, влияющих на состояние отдельных элементов.
Учебное пособие написано в соответствии с требованиями Государственного образовательного стандарта курса "Теория автоматического управления". Основное их содержание составляют математическое описание автоматических систем, основы частотного и структурного методов исследования систем, устойчивость, обеспечение устойчивости, качество регулирования, параметрический синтез линейных систем автоматического регулирования.
1 ОБЩАЯ ХАРАКТЕРИСТИКА ОБЪЕКТОВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.1 КРАТКИЕ ИСТОРИЧЕСКИЕ СВЕДЕНИЯ
Впервые сведения об автоматах появились в начале нашей эры в работах Герона Александрийского "Пневматика" и "Механика", где описаны автоматы, созданные самим Героном и его учителем Ктесибием: пневмоавтомат для открытия дверей храма, водяной орган, автомат для продажи святой воды и др. Идеи Герона значительно опередили свой век и не нашли применения в его эпоху.
В средние века значительное развитие получила так называемая "андроидная" автоматика, когда механики создали ряд автоматов, подражающих отдельным действиям человека, и, чтобы усилить впечатление, изобретатели придавали автоматам внешнее сходство с человеком и называли их "андроидами", т.е. человекоподобными.
В XIII в. немецкий философ-схоласт и алхимик Альберт фон Больштадт построил робот для открывания и закрывания дверей.
Весьма интересные андроиды были созданы в XVII - XVIII вв. В XVIII в. швейцарские часовщики Пьер Дро и его сын Анри создали механического писца, механического художника и др. Прекрасный театр автоматов был создан в XVIII в. русским механиком-самоучкой Кулибиным. Его театр, хранящийся в Эрмитаже, помещен в "часах яичной фигуры".
На рубеже XVIII и XIX вв., в эпоху промышленного переворота, начинается новый этап в развитии автоматики, связанный с ее внедрением в промышленность. Появились первые автоматические устройства, к которым относятся регулятор уровня Ползунова (1765 г.), регулятор скорости паровой машины Уатта (1784 г.), система программного управления ткацким станком Жаккара (1804 - 1808 гг.) и т.д. Этим было положено начало регуляторостроения.
В 1854 г. выдающийся русский механик и электротехник К. Константинов предложил использовать в паровых машинах "Электромагнитный регулятор скорости вращения", а А. Шпаковский в 1866 г. разработал регулятор, изменяющий подачу топлива в топку соответственно изменению давления пара в котле. В 1879 г. И. Возняковским и К.
Ворониным впервые был осуществлен принцип прерывистого регулирования при управлении питанием котла водой.
Если первые регуляторы были связаны с паровой машиной, то со второй половины XIX в. существенную роль в регуляторостроении начинают играть потребности в электрическом освещении. Так, в 60-е годы в работах В. Чиколаева впервые был применен электрический двигатель. А в 1874 г. он предложил и осуществил метод регулирования, составлявший основу современной электромашинной автоматики.
Этот новый период развития автоматики - период регуляторостроения, длившийся свыше полутора столетий, сыграл огромную роль в технике. В это время еще медленно и смутно начинают формироваться важнейшие принципы автоматики: принцип регулирования по отклонению Ползунова-Уатта, развившийся в концепцию обратных связей; принцип регулирования по нагрузке, послуживший основой теории инвариантности и др. Начиная с курса профессора Петербургского университета Д. Чижова в 1823 г., теория регуляторов входит составным элементом в курсы и монографии по механике и паровым машинам.
Общая теория регуляторов была разработана, в основном, в 1868 - 1876 гг. в работах Д. Максвелла и И. Вышнеградского. Основополагающими трудами Вышнеградского являются: "Об общей теории регуляторов", "О регуляторах непрямого действия". В этих работах можно найти истоки современных инженерных методов исследования устойчивости и качества регулирования.
Достойным продолжателем дела И. Вышнеградского был словацкий инженер А. Стодола, работы которого посвящены исследованию устойчивости ряда схем регулирования, в частности, непрямого регулирования с жесткой обратной связью. В этот же период сформулированы алгебраические критерии устойчивости Рауса и Гурвица.
Бурный рост промышленности отражается и на развитии работ в области теории регулирования. В конце XIX в. и начале XX столетия создаются новые виды электромеханических регулирующих приборов такие, как программные регуляторы, следящие системы и схемы компаудирования. Так, в 1877 г. А. Давыдов разработал проект первой следящей системы, содержащей электрические элементы, предназначенной для автоматического придания орудию надлежащего угла возвышения в соответствии с изменением расстояния до цели, которая была продемонстрирована в 1881 г.
В 1882 г. на Промышленно-художественной выставке в Москве был показан прототип современного программного регулятора, разработанного Н. Захаровым. До настоящего времени используется принцип "установления допустимых предельных значений регулируемого параметра", предложенный в 1884 г. Л. Снегуровым. В этот же период развивается параметрическое регулирование: разработаны дифференциальный регулятор В. Чиколаевым и схема компаудирования генераторов М. Доливо-Добровольским.
Большое значение для развития теории регулирования имели исследования А. Ляпунова. Его труд, опубликованный в 1892 г., "Общая задача устойчивости движения" явился важной вехой в развитии теории устойчивости. В этой работе А. Ляпунов дал первое в истории науки математически строгое определение устойчивости движения, а также разработал два метода решения задач об устойчивости. Первый заключается в обосновании и установлении точных границ применимости анализа устойчивости, основанного на линейных дифференциальных уравнениях, а второй позволяет исследовать устойчивость не только при бесконечно малых отклонениях - "устойчивость в малом", но и при конечных отклонениях - "устойчивость в большом".
Крупный вклад в теорию внес Н. Жуковский, который создал теорию орбитальной устойчивости на основе вариационных принципов динамики, а также дал математическое описание процессов в длинных трубопроводах, рассмотрел влияние сухого трения в регуляторах, исследовал некоторые процессы импульсного регулирования. Им написан первый русский учебник "Теория регулирования хода машин" (1909 г.).
К началу XX в. ив первом его десятилетии теория автоматического регулирования формируется как общая дисциплина с рядом прикладных разделов. Особенно четко мысль о теории регулирования как дисциплине общетехнического характера проводится в работах И. Вознесенского (1922 - 1949 гг.) - руководителя одной из крупных советских школ в этой области, который в 1934 г. впервые выдвинул принцип автономного регулирования. Большой его заслугой является разработка общего метода разбиения процесса регулирования с несколькими регулируемыми величинами на ряд автономных процессов.
Следует отметить ряд интересных изобретений этого периода: "Устройство для получения постоянного тока с постоянным напряжением при переменном числе оборотов генератора" К. Шенфера, "Способ повышения чувствительности регулирования числа оборотов двигателя" В. Володина и М. Писаренко и др. Данный период также характеризуется развитием вопросов автоматического регулирования производства и распределения электрической энергии. Большое значение имели работы С. Лебедева и П. Яданова в области устойчивости энергосистем.
В тридцатые годы XX в. создаются более эффективные методы исследования, в частности, частотные. Появляются работы X. Найквиста (1932 г.), содержащие критерий устойчивости радиотехнических усилителей с обратной связью, и А. Михайлова (1938 г.) "Гармонический метод в теории регулирования", которые вошли в практику в послевоенные годы. В 1946 г. Г. Боде и Л. Маккол ввели логарифмические частотные характеристики. Г. Браун, А. Холл, Д. Кемпбелл, Г. Честнат, В. Солодовников завершили разработку частотных методов синтеза и расчета систем, придав им форму, удобную для инженерных расчетов.
В 40 - 50 годы разрабатываются основы теории нелинейных систем, сложность которых состоит в отсутствии единого общего математического аппарата. Здесь следует отметить работы по устойчивости А. Лурье (1944 - 1951 гг.), А. Летова (1955 г.). Завершающим этапом этого направления считается разработка теории абсолютной устойчивости, выдвинутой А. Лурье и В. Постниковым (1944 г.), более детально сформулированной М. Айзерманом (1949, 1963 гг.) и доведенной до изящного решения румынским ученым В. Поповым (1959 г.).
Большое значение для качественного исследования нелинейных систем имеют методы фазовой плоскости и фазового пространства, основы которых заложены А. Андроновым и его школой в 1930 - 1940 гг.
Я. Цыпкиным разработаны основы теории релейных (1955 г.) и импульсных (60-е годы) систем с различными видами модуляции. Н. Крыловым и Н. Боголюбовым (1934 г.) разработан метод гармонического баланса для определения параметров автоколебаний и условий их возникновения.
В послевоенные годы теория автоматического управления развивалась плодотворно, и упомянуть обо всех направлениях и авторах просто невозможно. Вот некоторые из них: теория автоматического регулирования по возмущению, теория компенсации возмущений и инвариантности разработаны в трудах Г. Щипанова, В. Кулебакина, Б. Петрова идр.; принципы экстремального управления и теория поиска экстремума разработаны В. Казакевичем. А. Фельдбаумом, А. Красовским. В эти же годы создаются основы теории оптимального управления Л. Понтрягиным. А. Летовым, Н. Красовским и др.
В настоящее время значение теории автоматического управления переросло рамки только технических систем. Динамические управляемые процессы имеют место в живых организмах, экономических и организационных человеко-машинных системах, их влияние существенно и отказ от них приводит к крупным потерям.
Дальнейшее развитие и усложнение систем автоматически привело к созданию автоматизированных систем управления (АСУ) технологическими процессами (АСУТП), производством (АСУП) и отраслью (АСУО). По идеологии построения эти системы достаточно близки между собой, хотя функции и технические средства, на которых реализуются эти АСУ, характер решаемых задач существенно отличаются.
1.2 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами.
Любой технологический процесс можно расчленить на ряд более простых неравнозначных составных, но связанных между собой процессов. В связи с этим говорят, что в технологическом процессе выделяют рабочие операции, т.е. действия, непосредственным результатом которых является требуемая обработка материала, энергии, информации, и операции управления, обеспечивающие придание в нужные моменты нужных режимов, направлений и т.п.
Рабочие операции сопряжены с затратами энергии, и, если они выполняются человеком, то на их выполнение затрачивается его физическая сила. На операции управления затрачивается интеллектуальный труд человека, и эти операции требуют определенной квалификации исполнителя.
Замена труда человека в рабочих операциях работой машин и механизмов называется механизацией.
Совокупность операций управления образует процесс управления. Таким образом, под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели.
Замена труда человека в операциях управления действиями технических управляющих устройств называется автоматизацией. Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Совокупность технических средств, выполняющих данный процесс, является объектом управления. Совокупность средств управления и объекта образует систему управления. Система, в которой все рабочие операции и операции управления выполняют автоматические устройства, называется автоматической. Система, в которой автоматизирована только часть операций, другая же их часть сохраняется за людьми, называется автоматизированной (частично автоматической).
Частным случаем управления является регулирование. При регулировании координаты процесса (давление, температура, расход, положение и пр.) поддерживаются на заданном значении с помощью специальных устройств - автоматических регуляторов. Совокупность регулируемого объекта и автоматического регулятора образует систему автоматического регулирования. Объекты регулирования и управления по своей физической природе весьма разнообразны, но принципы построения систем управления и методы их исследования одни и те же.
Для наглядного схематического изображения системы автоматического управления (регулирования) используют структурные схемы, в которых отдельные элементы системы изображаются в виде прямоугольников, а связи между элементами - линиями со стрелками, показывающими направление передачи сигнала (рис. 1.1).
Объект
| 1 | -> | 2 | -> | 3 |
а — один элемент системы; б — несколько элементов системы
Основными элементами системы автоматического регулирования являются объект и регулирующее устройство (регулятор).
|
б) \і(0 \p(w) |
\(t)
Х„(0
Объект
Рис. 1.2 Примеры изображения объектов с входными и выходными сигналами:
а — односвязный — характеризуется наличием векторов, имеющих по одной координате; б — многосвязный — характеризуется несколькими взаимосвязанными координатами
Любой элемент системы характеризуется входной координатой (сигналом) x(t) и выходной координатой \(t), которая зависит от входного сигнала. В свою очередь входная координата может носить возмущающий и управляющий (регулирующий) характер. Возмущающее воздействие (возмущение) хвЦ) вызывает отклонение управляемой (регулируемой) координаты от заданного значения. Управляющее u(t) (регулирующее Xp(t)) воздействие служит для поддержания управляемой (регулируемой) координаты \(t) в соответствии с некоторым законом управления (поддержания регулируемой координаты на заданном уровне) (рис. 1.2).
Объектами управления являются в процессах химической технологии — механизмы, машины и аппараты, в которых протекают технологические процессы (измельчение, перемешивание, кристаллизация, сушка и др.); производства серной кислоты, автомобильных шин и т.п.; предприятия — заводы, фабрики и целые отрасли — химическая, нефтеперерабатывающая и т.п.
1.3 ПРИНЦИПЫ РЕГУЛИРОВАНИЯ
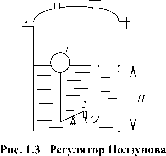
Первый промышленный регулятор, как уже говорилось ранее, был изобретен в 1765 г. И. Ползуновым для созданной им паровой машины. Принципиальная схема регулятора приведена на рис. 1.3.
Задачей регулирования является поддержание в паровом котле постоянного уровня. Регулятор представляет собой поплавок 1, связанный системой рычагов с регулирующей заслонкой 2. При увеличении уровня поплавок поднимается вверх, в результате чего заслонка опускается, перекрывая трубопровод и уменьшая подачу воды в котел. При уменьшении уровня поплавок опускается, что приводит к увеличению подачи воды и, следовательно, к повышению уровня.
| *п f ф*в |
 |
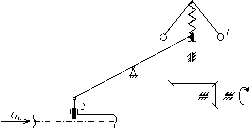 |
| Рис. 1.4 Регулятор Уатта |
Сравнительный анализ рассмотренных регуляторов показывает, что оба они построены по единому принципу, который наглядно проявляется на структурной схеме, представленной на рис. 1.5
б)
| а) | |||||||||||||||||||
| ([р) |
| (\) | |||||||||||||||||
|
Регулятор Регулятор |
а - Ползунова; б - Уатта
В рассматриваемых примерах основными элементами системы автоматического регулирования являются: объект - паровой котел и паровая машина; регулирующее устройство - поплавок и центробежная муфта с регулирующими заслонками, соответственно, в регуляторах Ползунова и Уатта.
8
Выходные координаты, они же и регулируемые переменные - уровень Н и число оборотов п; регулирующие переменные - подача воды в паровой котел - *в и расход пара в паровую машину - *п, возмущающие воздействия - давление пара в котле, расход топлива, его теплотворная способность в первом случае и во втором - нагрузка на валу паровой машины, давление пара в трубопроводе.
Принцип, по которому построены регуляторы Ползунова и Уатта, состоит в том, что регулятор изменяет регулирующее воздействие при отклонении регулируемой переменной от заданного значения независимо от причин, вызвавших это отклонение. Таким образом, в зависимости от значения выходного сигнала объекта регулятор изменяет его входной сигнал. Для реализации алгоритма регулирования в конструкцию системы вводится связь, получившая название обратной связи, потому что по ней происходит передача сигнала с выхода объекта на его вход по направлению, обратному направлению передачи основного воздействия на объект. Объект и регулятор образуют замкнутую систему, называемую автоматической системой регулирования (АСР). Если сигнал обратной связи складывается с основным сигналом, то связь называется положительной, если вычитается -отрицательной. В автоматических системах управления связь всегда отрицательна.
Схемы с обратной связью осуществляют управление по отклонению (рис. 1.6) показателя процесса - выходной координаты \(W) от заданного значения узад; А у = \(W) - узад - называется отклонением или ошибкой управления.
Объект
-узад
Регулятор
Рис. 1.6 Структурная схема регулирования по отклонению
Рассмотренная система управления с обратной связью относится к классу систем автоматического регулирования, по отклонению.
Таким образом, автоматической системой регулирования по отклонению называют систему, в которой измеряется отклонение регулируемой величины от заданного значения и в зависимости от измеренного отклонения подается такое воздействие на регулирующий орган, которое уменьшает величину отклонения так, что А у о 0 при W о f.
Кроме регулирования по отклонению возможен другой способ регулирования - это регулирование по возмущению или компенсация возмущений. В этом случае регулирующее воздействие вырабатывается регулятором в зависимости от величины возмущения. Системы регулирования по возмущению являются разомкнутыми системами, так как в них отсутствует обратная связь (рис. 1.7). Идея этого способа заключается в том, что, если мы сможем компенсировать все возмущения в системе, то регулируемая величина не будет отклоняться от заданного значения. Следует заметить, что компенсация достигается только по измеряемым возмущениям.
Рассматриваемый принцип регулирования впервые был предложен в 1830 г. французским инженером Ж. Понселе при разработке теории центробежных регуляторов хода машин по нагрузке на валу машины, являющейся одним из основных возмущений в объекте, но реализовать свое предложение на практике ему не удалось, так как динамические свойства машины не допускали непосредственного использования принципа компенсации.
| Регулятор | <— | [в | ||
| ' .. | 1 |
У -> | ||
| Объект |
В 1940 г. был предложен принцип инвариантности - достижение независимости управляемой координаты от возмущений, практическая реализация которого была получена только в 50-е годы.
Недостаток систем, построенных по принципу компенсации возмущений очевиден. Компенсировать все возможные возмущения в объекте удается крайне редко, а наличие таких возмущений как колебание состояния атмосферы, старение катализатора, отложение солей в аппарате, т.е. произвольное изменение свойств объекта, вообще не подлежит компенсации. Например, опасность использования принципа Понселе при регулировании уровня жидкости в емкости, когда приток жидкости соотносится с ее расходом, заключается в том, что вследствие изменения расходных характеристик вентилей на притоке и расходе, испарения жидкости, ее дренажа и т.п., емкость может переполниться, либо опустеть.
Регулирование по отклонению лишено этого недостатка, здесь компенсация отклонения регулируемой координаты от заданной происходит независимо от того, какими причинами вызвано это отклонение, но выполнить одновременно условия точности и быстродействия трудно. Часто повышение точности и быстродействия системы приводит к ее неработоспособности.
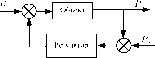
Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие оба рассматриваемых принципа (рис. 1.8).
В этих системах наиболее сильные возмущения компенсируются специальным регулятором, а контур регулирования по обратной связи устраняет отклонения регулируемой координаты, вызванные другими возмущениями.
Таким образом, в основе построения системы автоматического регулирования лежат общие фундаментальные принципы регулирования, определяющие, каким образом осуществляется поддержание регулируемой величины на заданном уровне в соответствии с причинами, вызывающими ее отклонение от этого уровня. В настоящее время известно и
Регулятор 2
| 04 Объект | ||||
|
Рис. 1.8 Структурная схема комбинированной АСР
используют два фундаментальных принципа регулирования: принцип регулирования по отклонению и принцип регулирования по возмущению.
1.4 ПРИМЕРЫ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ В ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
Пр имер 1 Регулирование температуры продукта в кожухотрубчатом теплообменнике.
Показателем эффективности регулирования является поддержание температуры продукта на выходе из теплообменника на заданном уровне.
В рассматриваемом примере температура продукта является выходной регулируемой координатой. Стабилизацию температуры легко осуществить, используя в качестве входного регулирующего воздействия расход горячего теплоносителя *г.т (рис. 1.9). Анализ объекта показывает, что устранить большую часть возмущающих воздействий невозможно. В связи с этим предлагается система регулирования по отклонению температуры продукта путем изменения расхода горячего теплоносителя.
| ^ Продукт а) |
 |
|
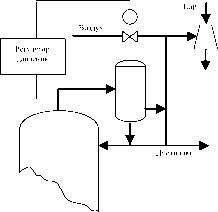
Рис. 1.9 Система регулирования температуры продукта в теплообменнике: а - технологическая схема; [ - структурная схема Пр имер 2 Регулирование давления в верхней части ректификационной колонны. |
 |
|
Рис. 1.10 Система регулирования давления в верхней части колонны: а - технологическая схема; [ - структурная схема |
В рассмотренных случаях структурные схемы систем автоматического регулирования носят упрощенный характер. В любой реальной АСР можно выделить следующие составные элементы: объект регулирования, чувствительный элемент (например, термопара), усилительно-преобразовательное устройство, регулятор, исполнительный механизм (например, мембранный исполнительный механизм), регулирующий орган (например, заслонка). Полная структурная схема изображена на рис. 1.11.
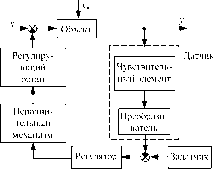 |
| Рис. 1.11 Структурная схема АСР |
1.5 КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Все системы автоматического управления и регулирования делятся по различным признакам на следующие основные классы.
1 По основным видам уравнений динамики процессов управления:
а) линейные системы;
б) нелинейные системы.
2 В зависимости от коэффициентов уравнений и вида уравнений как линейные, так и нелинейные системы подразделяются на:
а) системы, описываемые обыкновенными дифференциальными уравнениями с
постоянными коэффициентами;
б) системы, описываемые обыкновенными дифференциальными уравнениями с
переменными коэффициентами;
в) системы, описываемые уравнениями в частных производных;
г) системы с запаздыванием, описываемые уравнениями с запаздывающим аргументом.
3 По характеру представления сигналов различают:
а) непрерывные системы;
б) дискретные системы, среди которых выделяют импульсные, релейные, цифровые.
4 По характеру процессов управления:
а) детерминированные системы - системы с определенными переменными и процессами;
б) стохастические системы - системы со случайными переменными и процессами.
5 По характеру функционирования.
В зависимости от того, по какому закону изменяется заданное значение регулируемой величины, системы автоматического управления подразделяются на:
а) системы стабилизации, поддерживающие постоянство регулируемой величины, т.е. \зад(0 = const;
б) системы программного регулирования, в которых заданное значение регулируемой величины изменяется по определенной заранее временной программе;
в) следящие системы, в которых заданное значение регулируемой величины изменяется в соответствии с состоянием некоторого заданного вектора переменных во времени;
г) системы оптимального управления, в которых показатель эффективности зависит не только от текущих значений координат, как в экстремальном регулировании, но также от характера их изменения в прошлом, настоящем и будущем, и выражается некоторым функционалом. Нахождение оптимального управления предполагает решение достаточно сложной математической задачи соответствующими методами, кроме того органической составной частью системы является компьютер;
д) адаптивные системы, в которых автоматически изменяются значения \зад , собственные параметры или структура при непредвиденных изменениях внешних условий на основании анализа состояния или поведения системы так, чтобы сохранялось заданное качество ее работы. Системы с изменением заданного значения регулируемой величины называют экстремальными, с изменением параметров - самонастраивающимися, с изменением структуры - самоорганизующимися.
1.6 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 На рис. 1.12 изображен объект с входными и выходными сигналами. : Что такое объект управления? Приведите конкретный пример.
В Какие внешние переменные являются управляющими?
С Какая переменная является управляемой переменной?
| ||||||
| Рис. 1.12 Объект |
| |||||
| <8р Объект |
| *-<g> |
Рис. 1.13 Структурная схема АСР
: Какие принципы регулирования реализованы в САР, изображенной на рис. 1.13? В Что значит регулирование по отклонению?
С Какая система регулирования является наиболее эффективной?
3 На какие основные классы делятся системы автоматического регулирования?
: К какому классу относится линейная система?
В На какие подклассы делится класс "характер функционирования"?
С Что представляет собой класс "характер подачи сигналов"?
1.7 ТЕСТ
1 Какой процесс называется механизацией?
: Совокупность операций управления.
В Замена труда человека в рабочих операциях работой машин и механизмов. С Замена труда человека в операциях управления.
2 Систему управления образуют:
: Совокупность средств управления и объекта.
В Совокупность средств управления.
С Объект управления.
3 Чем характеризуется любой элемент системы?
: Входной координатой.
В Выходной координатой.
С Входной и выходной координатами.
4 Какой принцип регулирования был реализован в первом промышленном регуляторе уровня в котле паровой машины, изобретенном И. Ползуновым.
: Регулирование "по отклонению".
В Регулирование "по возмущению".
С Комбинированное регулирование.
5 Какая система регулирования называется автоматической?
: Все рабочие операции и операции управления выполняют автоматические устройства.
В Часть операций управления выполняют автоматические устройства, другую часть выполняет человек.
С Рабочие операции выполняют машины и механизмы, а операции управления -человек.
6 Детерминированные системы управления отражают:
: Характер подачи сигналов.
В Характер процесса управления.
С Характер функционирования.
7 При классификации систем управления по характеру функционирования система автоматического регулирования может быть:
: Системой программного регулирования.
В Системой с распределенными параметрами.
С Стохастической системой.
8 Система автоматической стабилизации - это система, в которой поддерживается:
: \зад(0 = const.
В \зад(0 = А*).
С \зад = АХ).
9 По основным видам уравнений динамики процессов управления системы подразделяются на:
: Непрерывные и дискретные.
В Детерминированные и стохастические.
С Линейные и нелинейные.
10 В оптимальных системах управления показатель эффективности зависит от:
: Текущих значений координат.
В Текущих значений координат, а также характера их изменения в прошлом, настоящем и будущем.
С Собственных параметров системы или структуры.
2 РЕГУЛЯРНЫЕ СИГНАЛЫ И ИХ ХАРАКТЕРИСТИКИ
В теории автоматического управления при рассмотрении тех или иных систем имеют место различные воздействия и сигналы. Анализ и синтез конкретных автоматических систем существенно упрощается, если пользоваться разработанной типизацией этих воздействий и сигналов. Математическим представлением сигналов является некоторая функция времени, определяющая закон его изменения, заложенный в нем независимо от физической природы. В зависимости от характера изменения сигнала во времени, формы математического представления различают регулярные - детерминированные и нерегулярные - случайные сигналы.
2.1 ОПРЕДЕЛЕНИЕ РЕГУЛЯРНОГО СИГНАЛА
Сигнал называется регулярным, если его математическим представлением является заранее заданная функция времени, т.е. он описывается конкретной функцией времени. Реальный же сигнал рассматривается как случайный процесс, определяемый вероятностными характеристиками, так как нельзя заранее предвидеть его изменение во времени.
Выражение регулярного сигнала, определенного функцией времени, называют временным представлением сигнала. Форма записи этих функций различна. Одной из форм записи является представление в виде тригонометрического ряда, каждый член которого является простейшей гармонической функцией времени - косинус или синус. Эти функции получили название гармоник, каждая из которых характеризуется амплитудой, частотой и фазой. Множество амплитуд, частот и фаз называют спектром рассматриваемой функции времени. Подобное представление сигнала называется частотным. Временное и частотное представления сигнала совершенно адекватны. Выбор того или иного представления зависит от особенностей и постановки рассматриваемой задачи.
2.2 ОСНОВНЫЕ ТИПЫ РЕГУЛЯРНЫХ СИГНАЛОВ.
ПЕРИОДИЧЕСКИЕ И НЕПРЕРЫВНЫЕ СИГНАЛЫ
К основным типам регулярных сигналов относятся периодический, почти периодический и непериодический сигналы.
Периодический сигнал представляет собой функцию времени, удовлетворяющую условию
f (t) = f (t + Г), (2.1)
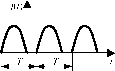 |
| Рис. 2.1 Пример периодической функции |
Периодическая функция flt) должна быть известна только в пределах промежутка времени, равного периоду Т, далее она в точности повторяется на протяжении каждого периода.
Периодический сигнал физически неосуществим, так как реальный сигнал не может продолжаться бесконечно, он имеет начало и конец. Однако в теоретических исследованиях понятие периодического сигнала используется широко и дает результаты, соответствующие наблюдаемым в действительности.
Периодическая функция произвольного вида, удовлетворяющая условиям Дирихле: ограниченная кусочно-непрерывная, имеет конечное число экстремумов на периоде, может быть представлена рядом
$ f
f (t) = ~0 + Z $« C0S(«®W -фя )¦> (2.2)
2 п =1
где :о - постоянная составляющая, :п - амплитуда; юп = п Z - частота; фп - начальная фаза п-й гармоники.
Таким образом, периодический сигнал можно рассматривать как результат наложения друг на друга бесконечного количества гармоник и постоянной составляющей.
Почти периодический сигнал представляет собой функцию, состоящую из суммы гармонических составляющих с произвольными частотами. При управлении тем или иным процессом встречаются сигналы, частоты которых не находятся в простых кратных соотношениях, что и предопределяет использование почти периодических сигналов. Основным свойством последних является тот факт, что для них может быть определен приближенный период (почти период).
Непериодическим сигналом называется регулярный сигнал, определяемый непериодической функцией, заданной в пределах конечного (t1 < t < t2) или полубесконечного (t1 < t < ») промежутка времени, вне

W1 t2 t
Рис. 2.2 Пример непериодического сигнала
которого она тождественно равна нулю. Форма сигнала может быть практически любой.
Непериодический сигнал можно представить периодической фун-кцией времени с бесконечно большим периодом (рис. 2.2).
Математический метод представления сложных сигналов как периодических, так и непериодических в виде совокупности элементарных гармонических составляющих называется гармоническим анализом.
2.3 ПРЕОБРАЗОВАНИЕ ФУРЬЕ,
ЕГО ОСНОВНЫЕ СВОЙСТВА
Для характеристики спектров сигналов используется преобразование Фурье. Прямым преобразованием Фурье называется оператор
)(Lz) = If (t)e-imdt, (2.3)
—f
обратным преобразованием Фурье -
F(t) = JF(iz)eiZtdz .
(2.4)
—f
Преобразование Фурье ставит во взаимное соответствие два множества функций (/(t) i F(i&)): первое множество At) - функции действительного аргумента t; второе множество F(iz) - функции мнимого аргумента iz. Прямое преобразование Фурье (2.3) позволяет по заданному оригиналуJ(t) найти его изображение F(iz), обратное преобразование (2.4) позволяет, наоборот, по заданному изображению F(iz) найти оригинал fit).
Основными свойствами преобразования Фурье являются:
1 Свойство линейности.
Если I (t) = ? ft (t), то
i=i
F (i&)=X Fi (i&), (2.5)
i=1
где I(t), f1(t), ..., fn(t) - некоторые функции; F(iz), F1(iz), ..., Fn(iz) - изображения
соответствующих функций.
2 Теорема запаздывания.
Если j(t) o F(iz), то
3 Теорема смещения спектра.
Еслиf(t) o F(iz), то
4 Различный характер функции f(t).
Если функция f(t) четная, то ее изображение является вещественной функцией, четной относительно z и определяется как
о
Если функция At) нечетная, то ее изображение является чисто мнимой функцией, нечетной относительно z:
о
Общее количество свойств преобразования Фурье гораздо больше, но именно приведенные выше (2.5) - (2.9) используются при исследовании регулярных сигналов.
2.4 СПЕКТРЫ СИГНАЛОВ
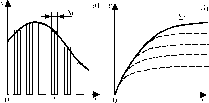
Как уже было сказано, периодический сигнал представляется рядом Фурье (2.2), и структура его спектра полностью определяется амплитудами и фазами гармоник, т.е. модулем Ап и аргументом фп, n = 1, 2, ...
Спектр амплитуд периодического сигнала, состоящий из равноотстоящих линий, длина которых пропорциональна амплитудам Ап соответствующих гармоник, приведен на рис. 2.3.
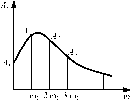
Рис. 2.3 Спектр периодического сигнала
Непрерывная кривая, соединяющая концы спектра, называется огибающей спектра амплитуд. На практике часто удобна для применения комплексная форма ряда Фурье:
(2.10)
где А„ - комплексная амплитуда,
- 2 ‘‘
а„ = 7 J/ (‘ )н
(2.11)
‘dt.
Для спектра любых периодических сигналов можно установить характерные свойства:
1 Спектры всегда дискретны, они содержат только гармоники, частоты которых кратны основной частоте. Некоторые гармоники могут отсутствовать.
2 Чем больше период сигнала L, тем меньше интервал ю = между соседними
частотами и, следовательно, "гуще" спектр. При Т of получают непериодическую функцию, спектр которой становится сплошным, но при этом амплитуды уменьшаются.
3 С уменьшением длительности импульсов w при постоянном периоде амплитуды гармоник уменьшаются, а спектр становится "гуще".
4 Если с уменьшением длительности прямоугольных импульсов увеличивать амплитуду
по закону А0 = 7, то их последовательность будет стремиться к последовательности дельтафункций, а амплитудный спектр - к постоянному для всех частот значению А = 7.
Для непериодических сигналов вводится понятие спектральной плотности, которая представляет собой
F (ію) = л dA, dю
Л Л
(2.12)
где А - бесконечно малые амплитуды непериодической функции,
А=f Е(t)H
-7/2
(2.13)
'‘dt .
Величину F(lZ) называют также спектральной характеристикой непериодической функции, а модуль |F(ію) = F(ю) - спектром.
Поскольку спектральная характеристика комплексная величина, то ее можно представить в виде
F(ію) = д(ю) + іЕ(ю) = F(ю)е-іф(ю),
где а(ю) = Гf (t)cos юtdю ; Е(ю) = [f (t)sin юtdю ; F(ю) = ^j[я(ю)]2 + [Е(ю)]2 ; ф(ю) = arctg-.
J J а(ю)
f f
Структура спектра периодического сигнала полностью определяется модулем и фазой спектральной характеристики.
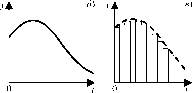
Зависимость модуля и фазы спектральной характеристики непериодического сигнала называют соответственно спектром амплитуд и спектром фаз непериодического сигнала. Особенности спектральных свойств непериодического сигнала состоят в следующем:
1 Спектр всегда непрерывен и характеризуется плотностью амплитуд гармоник, приходящихся на интервал [0; ю].
2 При уменьшении длительности импульса его спектр расширяется вдоль оси ю, а значения плотности амплитуд уменьшаются.
3 Если одновременно с уменьшением длительности w прямоугольного импульса
то импульс стремится к дельта-функции, а
увеличивать его амплитуду по закону Ап
спектральная плотность к постоянной величине, равной единице во всем диапазоне частот
(—да; да) .
2.5 РАСПРЕДЕЛЕНИЕ ЭНЕРГИИ В СПЕКТРАХ СИГНАЛОВВ случае периодического сигнала речь ведут о распределении мощности в его спектре, которая определяется как
ту ТУ f
(2.14)
„ 5 ,2 5 ,2
3ср = — А0 + — X Ап , п=1
где :0, :п - коэффициенты ряда Фурье соответствующего периодического сигнала; 5 -сопротивление элемента или участка, через который проходит сигнал.
Распределение энергии в спектре периодического сигнала представляется в виде суммы бесконечно малых слагаемых, соответствующих бесконечно малым участкам частотного спектра:
(2.15)
|[)(ю)] йю . 0
Выражение — [)(ю)] йю представляет собой энергию, выделяемую спектральными %
составляющими сигнала, расположенными в полосе частот йю в окрестности частоты ю, и называется энергетической спектральной плотностью непериодического сигнала. Формула (2.15) называется формулой Рейли или равенством Парсеваля и используется для выбора максимальной частоты пропускания при условии, что основные составляющие спектра пропускаются без изменения.
2.6 ПРАКТИЧЕСКАЯ ШИРИНА СПЕКТРА И ИСКАЖЕНИЯ СИГНАЛОВ
При передаче периодических сигналов через реальные системы управления может быть передано лишь определенное количество гармоник из их бесконечного числа. При этом важно передать гармонические составляющие с относительно большими амплитудами. В связи с этим вводится понятие практической ширины спектра сигнала, под которой понимается область частот, в пределах которой лежат гармонические составляющие сигнала с амплитудами, превышающими наперед заданную величину. При выборе практической ширины спектра сигнала необходимо учитывать требования к сигналу с энергетической точки зрения и с точки зрения сохранения его формы.
В случае непериодического сигнала так же, как и в случае периодического сигнала, желательно передавать составляющие сигнала со значительными амплитудами. С энергетической точки зрения практическая ширина спектра оценивается по области частот, в пределах которой сосредоточена подавляющая часть всей энергии сигнала, с точки же зрения допустимых искажений формы сигнала определить практическую ширину спектра не представляется возможным. Представление о характере искажений сигнала в зависимости от ширины спектра может быть получено при исследовании прохождения сигналов через системы с заданными характеристиками.
2.7 ПРЕДСТАВЛЕНИЕ СИГНАЛОВ
Сигналы могут быть представлены различным образом, при этом входной сигнал всегда является непрерывным, а представлению подлежит сигнал на выходе.
Один и тот же сигнал может иметь различную физическую природу - электрическую, звуковую, световую и т.д.
В теории управления наибольшее распространение получило математическое представление сигналов. Все виды математических представлений сигналов делятся на три основные группы:
1) непрерывное представление - выходной сигнал определен в любой момент времени (рис. 2.4, б);
| Объект |
 |
|
Рис. 2.4 Виды математических представлений сигналов: а - блок-схема системы; б - непрерывное; в - дискретно-непрерывное; г - дискретное |
[(0.

электрическими сигналами под модуляцией понимают изменение одного из параметров высокочастотного электрического сигнала по закону передаваемого низкочастотного сообщения. В случае модуляции гармонического сигнала различают два основных вида модуляции: амплитудная модуляция и угловая модуляция, которая подразделяется на частотную и фазовую. На практике чаще всего встречаются смешанные виды модуляции -амплитудно-фазовая или амплитудно-частотная, при этом один из видов модуляции является полезным, другой - паразитным.
2.8 СИГНАЛЫ. ИХ ВИДЫ
Наиболее часто в теории автоматического управления используются следующие сигналы.
1 Единичный скачок (рис. 2.5):
0 при t < 0;
1 при t > 0.
(2.16)
x(t) = 1(W)
1(t) называется также функцией Хевисайда. Строго говоря, функция Хевисайда физически нереализуема, однако, если, к примеру, на исследуемом объекте резко открыть вентиль, в результате чего расход подаваемого вещества изменится скачком с F1 до )2, то говорят, что на входе объекта реализован скачкообразный сигнал величиной )2 - )1, и если последняя разность равна единице, то на входе реализуется единичный скачок.
Спектральная характеристика для единичного скачка:
1 -і-
F(і&) = — е 2 .
&
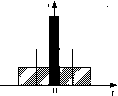
2 Единичная импульсная функция - дельта-функция (рис. 2.6) - это функция, удовлетворяющая следующим условиям:
1) 5(t) =i , n
[да при t = 0;
f
2) J/(t)Gt = 1.
[О при t z 0;
(2.17)
xA
Рис. 2.5 Единичный скачок
-ш->
t
Рис. 2.6 Единичный импульс
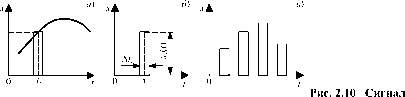
Дельта-функцию называют также функцией Дирака, она относится к классу сингулярных функций. Эту физически также нереализуемую функцию можно представить как импульс бесконечно малой длительности и бесконечно большой амплитуды, т.е. как предел, к которому стремится прямоугольный импульс с основанием At и площадью, равной единице (рис. 2.7, а), если At о 0 так, чтобы площадь импульса сохранялась равной единице. Также 5-функцию можно представить как предел некоторой функции (рис. 2.7, б):
|
/(t) = lim 5(t, Р) = lim - 2 2 Ро» ро» л(Р2t2 +1) а) |
 |
|
[ б) -Р = 10 Р =5 р=1 |
 |
а - прямоугольный импульс; б - 5(Р, ^-функция
К основным свойствам дельта-функции можно отнести следующие равенства:
0+
J5(t )dt = 1; (2.19)
05-функция является четной функцией:
5(t) = 5(-t); (2.20)
Jx(t)/(t)dt = [(0) , (2.21)
—»
т.е. из непрерывной функции можно "вырезать" одну ординату.
Последнее соотношение, используя рассмотренные уже свойства 5-функции, доказывается следующим образом:
J[(t)/(t)dt = J[(t)/(t)dt + J[(t)5(t)dt + J[(t)/(t)dt = [(0) • J/(t)dt = [(0).
—» —» 0— 0+ 0 —
Спектральная характеристика дельта-функции: F(iZ) = 1.
Между функцией Хевисайда и функцией Дирака существует связь, выражаемая соотношением:
J5(t)dt = 1(w), или 5(t) = 1'[t]. (2.22)
— »
На практике считается, что на вход объекта подана 5-функция, если время действия прямоугольного импульса намного меньше времени переходного процесса.
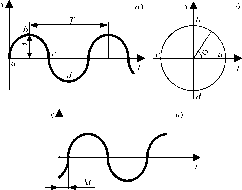
3 Гармонический сигнал (рис. 2.8, а)
(2.23)
[(t) = $ sinrot
используется при исследовании систем автоматического регулирования частотными методами.
ширина спектра сигнала.
—Fr. По этим 2 с
 |
|
Рис. 2.8 Гармонический сигнал: а - обычный сигнал; б - представление гармонического сигнала вращением вектора; в - гармонический сигнал со сдвигом фазы |
а)
б)
Рис. 2.9 Сдвинутые элементарные функции
Гармонический сигнал характеризуется такими параметрами, как амплитуда - А; период - Т; фаза - ф.
Между периодом и угловой скоростью справедливы соотношения
2л _ 2л
& = — и 7 = — Т &
(2.24)
Если колебания начинаются не из нуля, то они характеризуются фазой колебаний (рис. 2.8, в), которая во временной области характеризуется отрезком At, но обычно фазу выражают в радианах - ф (рис. 2.8, б). Перевод осуществляется по формуле
2лAt
Т
(2.25)
На практике для получения гармонического сигнала используется генератор синусоидальных колебаний.
4 Сдвинутые элементарные функции.
К этим функциям относятся функции Хевисайда и Дирака с запаздыванием, т.е. l(t - w) и 5(t - w) (рис. 2.9),
[О, t z т;
причем S(t - т) = <
[да, t = т.
Все свойства 5-функции сохраняются, но записываются в виде:
J5(W - x)dt = 1;
5(t - x) = 5(x -1) = 5(-(t - x));
f
J x(t) 5(t - x) dt = x(x).
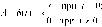
| 5 Сигнал произвольной формы - x(t) (рис. 2.10, a). |
 |
a - входной непрерывный сигнал; [ - импульс x(i); в - суперпозиция импульсов, определяющих сигнал x(t)
Любой сигнал произвольной формы можно представить с помощью 5-функции. С этой целью выделяется произвольный момент времени t, и строится столбик высотой x(t) (рис. 2.10, [), соответствующий значению сигнала в момент времени t = t* и основанием At*.
Этот импульс можно выразить через приближенную дельта-функцию -5 (t - tL):
/(t~ti) = ‘
площадь равна 1; ширина равна Д t*;
1
высота равна-,
ДЬ
т.е. xi(t) = )Ati5(t - ).
Заменяя функцию x(t) набором импульсов (рис. 2.10, в), можно записать: a (t)=Х x(ti)At*a (t - ti).
i =1
Если теперь n o f, At* o dx,5 (t -1*) o 5(t - x), то
x(t) = Jx(w)5(t -w)dw . (2.26)
0
Сигнал произвольной формы можно представить и через единичные функции, для чего выражение (2.26) следует проинтегрировать по частям, используя
соотношение 5(t - x) = 1'(t - x), в результате чего по-лучают следующее соотношение
x(t) = x(0) • l[t] + Jx'(w) • 1(t - x)dx . (2.27)
0
2.9 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 В системах автоматического управления наблюдаются различные воздействия и сигналы. Для упрощения анализа и синтеза конкретных систем пользуются разработанной типизацией этих воздействий и сигналов.
: Какой сигнал называется регулярным"
В Какие существуют виды представления сигналов?
С Какие сигналы относятся к основным типам регулярных сигналов?
2 Для характеристики спектров сигналов используется преобразование Фурье. Спектр периодических сигналов характеризуется определенными свойствами. Для непериодического сигнала вводится понятие спектральной плотности.
: Какое преобразование называется преобразованием Фурье?
В Какими характерными свойствами обладает спектр периодического сигнала?
С Что такое спектральная характеристика непериодической функции?
3 В теории автоматического управления используются так называемые стандартные сигналы, к которым относятся единичный скачок, единичная импульсная функция - дельтафункция, гармонический сигнал.
: Какая функция называется дельта-функцией?
В Как на исследуемом объекте подать сигнал в виде единичного скачка?
С Какими параметрами характеризуется гармонический сигнал?
2.10 ТЕСТ
1 Сигнал называется регулярным, если его математическим представлением является: : Заранее заданная функция времени.
В Заранее заданная функция частоты.
С Заранее заданная функция времени и частоты.
2 Сигнал называется периодическим, если он представляет собой:
: Функцию времени и удовлетворяет условию ft) = ft + Г) , —f < t < да.
В Функцию времени и удовлетворяет условию ft) = ft + Г),
tl < t < ?2.
С Функцию частоты и удовлетворяет условию fz) = fz + W),
—f < Z < f.
3 Какое из преобразований называется преобразованием Фурье?
: )(i z) = J/ (t) eiztdt.
В F(z) = J/ (t) e —iztdt.
—izt
С F(i z) = J/(t) e-iztdt.
 |
| С F (iz) = п , |
5 Функцией Хевисайда называется функция:
0 при t < 0;
1 при t > 0.
В x(t) = 1 при Vt.
C x(t)
п „ [0 при 0>t > t2;
C x(t) = <
[1 при 0 < t < t1.
6 Дельта-функцией называется функция, удовлетворяющая условиям:


7 Какая функция относится к сдвинутым элементарным функциям" : x(t).
В x(t - w).
C x(t) + x(w).
8 Сигнал произвольной формы можно представить как:
: x(t) = J"x(w) h(t - w) Gw .
В x(t) = Jx(w) G(t -w) Gw .
C x(t) = Jx(w) h(t - w) 5(x) Gw .
9 Сигнал называется гармоническим, если : x(t) = Ah(t)sinюt.
В x(t) = A 5(t)sin юt.
C x(t) = A sin ю t .
10 Между функцией Хевисайда и функцией Дирака существует связь, выражаемая соотношением
: 1[W] = 5'(w). В 5(w) = 1'[W].
C Jl[t] Gt = 5(t) .
3 МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ
3.1 ОСНОВНЫЕ СПОСОБЫ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ. УРАВНЕНИЯ ДВИЖЕНИЯ
Математическое описание автоматической системы управления - это описание процессов, протекающих в системе на языке математики.
Построение любое системы управления начинается с изучения объекта управления и составления его математического описания. В качестве объекта может выступать аппарат, технологический процесс, производство, предприятие и отрасль. Различие математических моделей объектов обуславливается их назначением. Эти модели описывают различные режимы работы объекта или системы управления и могут быть получены одним из способов: экспериментальным, аналитическим, комбинированным или экспериментальноаналитическим.
При экспериментальном способе уравнения моделей получают путем постановки специальных экспериментов (метод активного эксперимента) или путем статистической обработки результатов длительной регистрации переменных объекта в условиях его нормальной эксплуатации (метод пассивного эксперимента).
При аналитическом описании уравнения моделей получают на основании физикохимических закономерностей протекающих процессов.
При экспериментально-аналитическом подходе уравнения моделей получают аналитическим путем с последующим уточнением параметров этих уравнений экспериментальными методами.
При разработке математического описания автоматических систем следует учитывать основные методологические положения теории автоматического управления. Это прежде всего системный подход к решению задач управления, рассматривающий поведение объекта и регулятора в процессе регулирования в неразрывной взаимосвязи; возможность применения методов теории автоматического управления к системам самой разнообразной физической природы вследствие абстрагирования математических моделей от конкретных физических систем. Кроме того, система рассматривается как цепь взаимодействующих физически и информационно элементов и обладает способностью передавать физические воздействия и информационные сигналы в одном, строго определенном направлении; каждый же элемент системы рассматривается как преобразователь входного воздействия в выходную реакцию. Математическое описание как отдельных элементов, так и системы в целом составляется, как правило, с рядом допущений и упрощений, удачность которых зависит от глубины знаний исследователя системы в данной области, его интуиции и обязательно подлежит экспериментальной проверке.
В общем случае уравнения, математической модели объекта или системы управления, устанавливающие взаимосвязь между входными и выіходныіми переменныіми, называются уравнениями движения.
Уравнения, описывающие поведение системы регулирования в установившемся режиме при постоянных воздействиях, называются уравнениями статики.
Уравнения, описывающие поведение системы регулирования при неустановившемся режиме при произвольных входных воздействиях, называются уравнениями динамики.
Все объекты регулирования можно разделить на два класса: объекты с сосредоточенными координатами, динамика которых описывается обыкновенными дифференциальными уравнениями, и объекты с распределенными координатами, динамика которых описывается дифференциальными уравнениями в частных производных. В дальнейшем рассматриваются только объекты с сосредоточенными координатами.
В качестве примера можно рассмотреть объект с сосредоточенными координатами, описываемый дифференциальным уравнением второго порядка (рис. 1.2)
)(у, у', у", [, [') + / = о, (3.1)
где у - выходная переменная; х, f - входные переменные; у',х' - первые производные по времени; у" - вторая производная по времени.
При постоянных входных воздействиях х = хо; f = f0 с течением времени выходная величина принимает постоянное значение у = уо и уравнение (3.1) преобразуется к виду:
) (уо, О, О, Хо,0) + /о = о. (3.2)
Конечное уравнение (3.2) является уравнением статики.
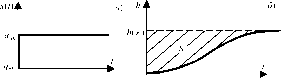
Статический режим можно характеризовать с помощью статических характеристик. Статической характеристикой объекта (системы) называется зависимость выходной величины от входной в статическом режиме.
Статическую характеристику можно построить экспериментально, если подавать на вход объекта постоянные воздействия и замерять выходную переменную после окончания переходного процесса. Если объект имеет несколько входов, то он характеризуется семейством статических характеристик. В свою очередь, сама статическая характеристика
характеризуется коэффициентом N, который определяется как N = —. Для объектов с
dx
нелинейной статической характеристикой коэффициент усиления является переменной величиной, для объектов же с линейными статическими характеристиками коэффициент усиления - величина постоянная (рис. 3.1).
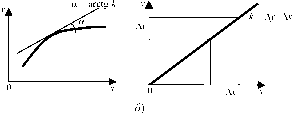 |
|
Рис. 3.1 Статическая характеристика объектов: а - нелинейного; б - линейного |
В теории автоматического управления широко используется метод математических аналогий, согласно которому различные по физической природе объекты описываются однотипными математическими зависимостями.
Рассмотрим некоторые примеры составления уравнений статики и динамики для различных по физической природе объектов.
3.2.1 Гидравлический резервуар
Примером простейшего объекта автоматического управления является гидравлический резервуар, в котором имеется приток и сток жидкости. Принципиальная и структурная схемы представлены на рис. 3.2.
Основной координатой, характеризующей состояние рассматриваемого объекта, является уровень жидкости Н, который выбирается в качестве выходной регулируемой величины. Входным и соответственно регулирующим воздействием является скорость притока воды в резервуар Q, внешним возмущением - расход воды из резервуара G. При постоянной степени открытия дросселя на притоке жидкости, уровень
-W-
б)
Н
"55
а)IQ
(*в)і G
([)
Объект
Рис.3.2 Гидравлическая емкость:
а - принципиальная схема; б - структурная схема определяется разностью (Q - G). По условиям работы объекта величина притока Q изменяется произ\ольно \о \ремени.
Уравнение динамики, описывающее зависимость уровня Н в переходном режиме от Q, в соответствии с законом гидравлики записывается в виде
s^+-Q-G, (3.3)
at
где S - площадь поперечного сечения резервуара.
Уравнение (3.3) представляет собой математическое описание объекта регулирования -гидравлической емкости и является обыкновенным дифференциальным уравнением 1-го порядка.
3.2.2 Электрическая емкость
Электрической емкостью называется цепь, состоящая из сопротивления 5 и емкости С (рис. 3.3).
б)
| 5 а) |
 |
Л*
(\)
Объект
Рис. 3.3 Электрическая емкость:
а - принципиальная схема; б - структурная схема
Выходной координатой такого объекта может быть выбран заряд q на обкладках конденсатора, а входной - напряжение на входе цепи 8вх.
Дифференциальное уравнение может быть получено на основе закона Кирхгофа:
at с ? '
Таким образом, математическим описанием электрической емкости является обыкно\енное дифференциальное ура\нение 1-го порядка.
Пусть в реакторе протекает химическая реакция типа А о В (рис. 3.4). При выводе уравнений приняты следующие допущения:
1) в реакторе осуществляется идеальное перемешивание реакционной смеси, т.е. концентрация во всех точках реактора одинакова;
2) теплоемкость реакционной смеси постоянна и равна теплоемкости исходного реагента;
3) реакция протекает в изотермических условиях, т.е. температура в реакторе постоянна.
а)
В
с$
б)С?.
(\)
$0
([)
Объект
Рис. 3.4 Химический реактор:
а - принципиальная схема; б - структурная схема
При этих допущениях реактор может рассматриваться как объект с сосредоточенными параметрами, материальный баланс которого имеет следующий вид:
| Изменени | Кол-во | Кол-во | Кол-во | |||
| е кол-ва | реагента^, | вышедшего | вещества | |||
| ве-щества | поступивш | - | вещества А | - | А. | |
| А в | его в | из реактора | вступивш | |||
| реакторе | реактор во | его в | ||||
| входном | реакцию | |||||
| потоке |
где V - объем реактора; С$ - концентрация вещества $; W - время; q - объемный расход реагента А; С$ - входная концентрация вещества; А, К - константа скорости реакции.
Таким образом, описание химического реактора идеального перемешивания, в котором протекает реакция типа А о В, является обыкновенным дифференциальным уравнением первого порядка.
Как видно из этих трех примеров, динамические свойства различных по физической природе объектов обладают некоторыми общими чертами, благодаря чему все рассмотренные объекты описываются однотипными уравнениями - обыкновенными дифференциальными уравнениями первого порядка.
3.3 ОПРЕДЕЛЕНИЕ ЛИНЕЙНОЙ СТАЦИОНАРНОЙ СИСТЕМЫ. ПРИНЦИП СУПЕРПОЗИЦИИ
В теории управления к линейным системам обычно относят те системы, в которых протекающие процессы являются стационарными и описываются линейными дифференциальными уравнениями с постоянными или функционально зависящими от времени коэффициентами. Важным свойством таких систем является их соответствие принципу суперпозиции. В связи с этим определение линейной системы, как правило, дается в следующем варианте: линейными называются системы, подчиняющиеся принципу суперпозиции, который заключается в том, что реакция объекта на сумму входных сигналов ^х/(w) равна сумме реакций на каждый сигнал в отдельности для любых xL(W).
Математическая запись принципа суперпозиции состоит из двух соотношений:
(3.6)
У(схЙ)) = cy( x(t)). (3-7)
Важно отметить, что линейность статических характеристик является необходимым, но не достаточным условием линейности, так как выполнение принципа суперпозиции необходимо не только в статике, но и в динамике. В то же время статическая характеристика, описываемая уравнением прямой у = ах + Ъ , не отвечает принципу суперпозиции. Покажем это на примере функции у = 2 х + 3. Для этого проведем эксперимент, который можно проиллюстрировать постановкой не менее трех опытов.
1 опыт.: на вход объекта подадим сигнал хі = 2 и определим выходную координату под действием этого сигнала уі = 7 (рис. 3.5, а).
2 опыт: на вход объекта подадим другой сигнал х2 = 3, и определим соответствующее ему изменение выходной координаты у2 = 9 (рис. 3.5, [).
3 опыт: на вход объекта подается сигнал, равный сумме в первых двух опытах, х3 = 5 и определяется выходной сигнал у3 = 13 (рис. 3.5, в).
Вследствие того, что у3 z у1 + у2 (13 z 16 ), можно утверждать, что для данной функции принцип суперпозиции не выполняется. Для устранения данного типа нелинейности следует перенести начало координат таким образом, чтобы нулевому входу соответствовал нулевой выход.
Так как большинство объектов управления являются нелинейными, то при определенных условиях нелинейные характеристики могут быть приближенно заменены линейными характеристиками, т.е. производится линеаризация нелинейных зависимостей.
| 1 опыт ' 2 опыт |
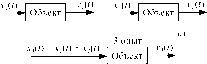 |
| Рис. 3.5 Иллюстрация эксперимента по проверке объекта |
 |
| Рис. 3.6 Линеаризация нелинейной статической характеристики |
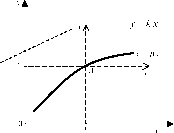
Пусть статическая характеристика описывается нелинейной п раз дифференцируемой, где п - любое натуральное число, функцией у = Дх), которую необходимо линеаризовать в окрестности точки (хо, уо) (рис. 3.6).
Если в пределах максимально возможных отклонений у и х от х° и у° fix) мало отличается от линейной функции, то можно fix) заменить ее приближением у = / (х). Функцияfx) находится из ряда Тейлора:
/(х) = / (хо) + ^ ^ (х - хо) + •••;
у - у ° = f(х) - f(х°) # / X х°)( х - х°).
получим линеаризованное
Переходя к новой системе координат, х = х - х°; у = у - у°, уравнение объекта
у = кх, где к
dt
х°
3.4 ДИНАМИЧЕСКОЕ ПОВЕДЕНИЕ ЛИНЕЙНЫХ СИСТЕМ
Под системой в дальнейшем будет пониматься любое множество элементов (может быть отдельный элемент), образующее некоторое целостное единство безотносительно к функциям, которые они выполняют, т.е. это может быть объект, регулятор, система регулирования и т.д.
Система называется динамической, если она описывается дифференциальными, интегральными либо конечными уравнениями, завися-
х(0>
у(0^
Рис. 3.7 Структурная схема системы
щими от времени, и называется статической, если в ее описании отсутствует параметр времени.
Наибольший интерес представляет изучение динамического поведения линейной системы, которая в общем случае представлена на рис. 3.7.
Основной задачей изучения динамического поведения линейной системы является получение возможности рассчитывать выходной сигнал у(і) для любого известного входного сигнала х(^).В связи с этим необходимо располагать математическим аппаратом для исследования линейной системы (рис. 3.8).
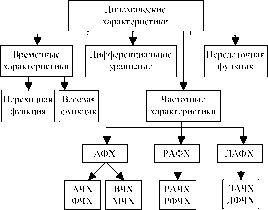 |
| Рис. 3.8 Динамические характеристики |
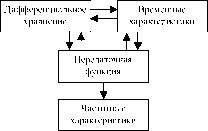 |
| Рис. 3.9 Взаимосвязь динамических характеристик |
Между этими характеристиками существует связь, которую иллюстрирует схема, изображенная на рис. 3.9.
Ряд динамических характеристик можно получить экспериментальным путем, а некоторые являются теоретическими. На практике экспериментально получают временные характеристики и частотные, точнее, АЧХ и ФЧХ, и уже на основе их записываются дифференциальное уравнение, передаточная функция, а также расширенные и логарифмические частотные характеристики. Таким образом, чтобы оценить динамическое поведение линейной системы необходимо познакомиться со всеми динамическими характеристиками.
3.5 ДИНАМИЧЕСКИЕ ПРОЦЕССЫ В СИСТЕМАХ
Основным математическим аппаратом при изучении и исследовании систем управления является аппарат дифференциальных уравнений. Круг рассматриваемых объектов был уже определен - это линейные объекты с сосредоточенными координатами. При этом различают стационарные объекты, коэффициенты дифференциальных уравнений которых не изменяются во времени, и нестационарные объекты, у которых коэффициенты изменяются с течением времени, например, изменение теплопроводности, старение катализатора и др.
Большинство объектов регулирования являются нестационарными объектами, однако, скорость изменения их свойств намного меньше скорости регулирования, поэтому такие объекты при расчете систем регулирования можно приближенно рассматривать как стационарные в течение определенного промежутка времени, за который свойства объекта не успевают существенно измениться.
Далее будут рассматриваться линейные стационарные объекты (системы) с сосредоточенными координатами, которые описываются обыкновенными
дифференциальными уравнениями с постоянными коэффициентами:
а„У(Я) (W) + D„-1У("Ч) (W) +... + D1 /О) + D0У(W) = brnx(m) (W) + brn-Iх(”4) (W) +...
Уравнение (3.8) описывает поведение объекта, который имеет статическую
характеристику у =—x в неустановившемся (переходном) режиме при любой форме
а0
входного сигнала x(t).
Частными случаями уравнения (3.8) являются уравнения
а„у(П) (t) + ап-1 У(Я-1) (t) +... + а1 У '(t) + а0\(t) = brnx(m) (t) + bm-lx(”-1) (t) +...
...+b1x(t), (3.8, а)
а„У („)(t) + а„-1 У („ 1)(t) +... + а1 У' (t) = bmx(m)(0 + bm-1x (m 1)(t) + ...
...+bX (t)+b0 x(t). (3.8, [)
Для объектов, описываемых уравнением (3.8, а), статическая характеристика существует, но является вырожденной, так как b0 = 0. Для объектов же, описываемых уравнением (3.8, [), статическая характеристика не существует.
Объекты, имеющие статическую характеристику, называются статическими, а не имеющие статической характеристики, называются астатическими.
В большинстве случаев, как уже отмечалось выше, уравнения систем автоматического регулирования оказываются нелинейными, поэтому, если это возможно, проводят линеаризацию этих уравнений при помощи ряда Тейлора путем разложения нелинейных функций некоторых переменных по степеням малых приращений этих переменных, взятых в окрестности их значений, соответствующих установившемуся режиму. В результате получают линеаризованные уравнения в отклонениях. Таким образом, в большинстве случаев дифференциальное уравнение (3.8) является уравнением в отклонениях, которое описывает объект или систему регулирования только в окрестности установившегося режима. Для линейных систем уравнения в отклонениях и исходные уравнения совпадают.
Для получения решения уравнения (3.8) необходимо задать начальные условия, под которыми понимается состояние процесса в момент времени, принятом за его начало ‘ = 0:
У(0) = У0; У '(0) = у0,...,У(„Ч)(0) = у0„Ч). (3.9)
Общее решение уравнения (3.8) представляется в виде:
У(‘) = Усв (‘) + Увын (‘). (3Л°)
В выражении (3.10) Усв(‘) является общим решением соответствующего однородного уравнения и _увын(‘) - частное решение неоднородного уравнения (3.8). Следовательно, Усв(‘) соответствует движению системы в отсутствии входного сигнала x(‘) { 0, т.е. собственному свободному движению системы, и определяется свойствами самой системы, которые проявляются в свойствах корней характеристического уравнения. Если эти корни различны, то
Усв (‘) = Х Сіе°‘‘, (3.11)
І=1
где O - корни характеристического уравнения; cL - произвольные постоянные, определяемые из начальных условий.
Частное решение увын(0 зависит от вида функции x(t), определяющей входное воздействие на систему, и соответствует вынужденному движению (состоянию) системы.
Решение (3.10) уравнения (3.8) определяет динамический процесс в системе, происходящий с момента подачи входного воздействия, который принят за начало отсчета времени, поэтому движение системы (переходной процесс) рассматривается только при t > 0, для t < 0 он принят тождественно равным нулю.
Выходной сигнал y(t), получающийся в течение такого процесса, является наиболее полной характеристикой динамических свойств системы, поэтому определение этого сигнала, как уже отмечалось, и является основной задачей теории регулирования. Здесь становится актуальной идея изучения динамических свойств системы с помощью временных характеристик.
3.6 ПЕРЕХОДНАЯ И ВЕСОВАЯ ФУНКЦИИ
3.6.1 Переходная функция
Для получения переходной функции в качестве стандартного сигнала используется единичная функция времени (2.16). Такого рода воздействию соответствует, например, сброс или включение нагрузки в системах регулирования (отказ мотора в системе регулирования).
 |
|
Рис. 3.10 Переходная характеристика химического реактора: а - ступенчатое воздействие; б - кривая разгона |
апУ (q) (t) + ап-1 У (q 1)(w ) +... + D1 y'(t) + Do) = Eo1(t X \(0) = 0; y'(0), ... , y(q-1)(0) = 0. (3.12)
Кривой разгона называется реакция объекта (системы) на единичное ступенчатое воздействие при нулевых начальных условиях.
На практике кривая разгона определяется экспериментальным путем и используется в качестве исходных данных для анализа и синтеза систем автоматического управления исследуемого объекта.
Здесь следует ввести понятия прямой и обратной задач. Прямая задача (задача Коши) заключается в определении решения дифференциального уравнения с заданными начальными условиями. В обратной задаче требуется восстановить вид и коэффициенты дифференциального уравнения по известной интегральной кривой, например, переходной функции. Решение обратной задачи представляет значительную сложность вследствие ее некорректности и здесь существует специальный математический аппарат. Так, например, если предположить, что переходная функция описывается решением уравнения первого порядка
DУ (t) + Dy(t) = Ex(t), x(t) = 1(t), y(0) = 0, или Ty'(t) + y(t) = kx(t),
где N = —; Т = —, то определению подлежат N - коэффициент усиления и Т - постоянная а0 а0
времени.
В статике y\t) = 0 и, следовательно, у(да) = Nx(f), откуда коэффициент усиления N = \(f),
x(f )
так как x(f) = 1; \(f) = h(f), то N = h(f).
Для определения постоянной времени Т исходное уравнение интегрируется в пределах от 0 до да:
Т J" y(t)dt = J"[Nx(t) - \(t)]dt = J"[h(f) - h(t )]dt.
0 0 0
Правая часть последнего выражения есть не что иное, как площадь S под экспериментально снятой кривой разгона (рис. 3.10, б), тогда можно записать: Т h(f) = S,
откуда Т = -S-.
h(f)
3.6.2 Весовая функция
Для получения весовой функции, ее также называют импульсной переходной функцией, в качестве стандартного сигнала используется 5-функция (2.17):
0 при t z w; f при t = w;
J"5(t )dt = 1.
G(t -w)
Таким образом, весовой функцией w(t) называется реакция системы на 5-функцию при нулевых начальных условиях.
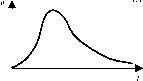
На практике весовую функцию в отдельных случаях можно получить экспериментальным путем весьма приближенно. Считают, что на вход объекта подана 5-функция, если время действия импульса намного меньше времени переходного процесса. Примером может служить эксперимент по снятию весовой функции химического реактора (рис. 3.4), являющегося объектом исследования. В качестве входного сигнала в реактор залпом выливается порция красящего вещества (например, чернил). Через некоторое время это вещество появится на выходе, причем его концентрация первоначально возрастает, а затем убывает - красящее вещество вымывается (рис. 3.11).
Подаваемый на вход импульс представляет собой приближенную дельта-функцию, так как его площадь отлична от единицы и равна S. Поэтому для получения весовой функции экспериментально снятый переходный процесс нормируют путем деления его ординат на величину площади входного воздействия S.
а)
 |
|
Рис. 3.11 Переходная характеристика химического реактора: а - 5-функция; б - весовая функция Между временными характеристиками: переходной и весовой функциями существует взаимное однозначное соответствие, которое определяется следующим образом: |
At
At
w(t) = h c(t); h(t) = J"w(x)dx.
Весовую функцию можно получить и как решение дифференциального уравнения
а„у („)(t) + а„-1 у („-1)(t)+•••+ау'О) + ао y(t) = EG(t);
\(W) = у'(0) = ••• = у(п-1) (0) = 0^
При решении подобных уравнений дельта-функцию переводят в начальные условия, и
если „ = 2, то а2у (t) + Діу (t) + Doy(t) = 0; у(0) = 0; у'(0) = — •
а2
3.7 ИНТЕГРАЛ ДЮАМЕЛЯ
Интеграл Дюамеля используется для определения выхода объекта y(t) при произвольном входном сигнале x(t) и известных K(t) либо w(t)
Предполагается, что на вход объекта, описываемого весовой функцией w(t), подается сигнал x(t) (рис 3Л2, а), подробное описание которого дано в п 2^
Если реакцию объекта на 5(t - tL) обозначить через w(t - tL) (весовая функция), а реакцию на 5(t - tL) через Z(t - tL) (приближенная весовая функция), то на основании принципа суперпозиции можно записать выходной сигнал на импульс у (t):
У (t) = Z(t - t!. )А^Х(Д^
 |
|
Рис. 3.12 Представление входного (а) и выходного сигналов ([) Замена входного сигнала x(t) набором импульсов, высота которых совпадает с соответствующими координатами (рис 3Л2), позволяет записать реакцию на ступенчатую функцию у(t) на основании принципа суперпозиции |
i=0 L=0
Если теперь устремить AtL o 0, при этом tL o w; „ of; y(t - tL) o 8(t - w); Z(t - tL) o z(t - w), а
AtL o Gw, где w - непрерывный параметр, показывающий сдвиг каждого импульса, то окончательно получаем:
уЙ) = J z(t -w) x(x)Gx^ (3Л3)
0
Последнее уравнение называется интегралом Дюамеля (уравнением свертки), отражающим связь между входом, выходом объекта и его весовой функцией
По сути дела весовая функция является памятью объекта, которая показывает, как долго и как сильно влияет на объект импульсное возмущение, поданное на его вход в момент времени w = 0^
Из физического смысла весовой функции верхний предел интегрирования может быть заменен на t, так как невозможно представить реальную систему, в которой на выходную координату в настоящий момент времени оказывают влияние возмущения, которые появляются в последующие моменты времени.
Если произвести замену в формуле (3.13) t = х = [, dx = d[, то можно записать симметричную формулу
\(t) = Jx(t - [)Z([)d[. (3-14)
о
Если для представления входного сигнала использовать не формулу (2.26), а (2.27), то интеграл Дюамеля записывается через переходную функцию:
dx(x)
dw
\(t) = x(0)h(t) + Jh(t - w) о
(3.15)
dw ,
или
\(t) = x(0)h(t) + J-d[(W—— h (x)dx. о dw
3.8 ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
Основным математическим аппаратом, который используется в теории автоматического управления, является специальный метод прикладного анализа, так называемый операционный метод, в основе которого лежит функциональное преобразование Лапласа.
3.8.1 Определение преобразования Лапласа
Преобразованием Лапласа называется преобразование функции x(t) переменной t в функцию o(s) другой переменной s при помощи оператора, определяемого соотношением
/{x(t)} = x(v) =Jx(t)e s‘dt, (3.16)
о
где x(t) - оригинал функции; x(v) - изображение по Лапласу функции x(t); ? - комплексная
переменная ? = а + iz.
Формула (3.16) определяет прямое преобразование Лапласа. Возможно и так называемое обратное преобразование Лапласа, позволяющее по изображению найти оригинал. Оно определяется соотношением
/-1 {x(v)} = x(t) = [x(s)estds , (3.17)
2s L J
c-iz
где с - абсцисса сходимости функции x(s).
Для большинства функций, встречающихся на практике, составлены таблицы соответствия между оригиналами и изображениями. Изображения некоторых наиболее часто встречающихся функций в теории управления приведены в табл. 3.1. Если же функция отсутствует в таблице, то ее изображение можно получить непосредственно, пользуясь соотношением (3.16).
Пример 3.1 Требуется найти преобразование Лапласа от функции x(t) = e~at.
Согласно определению преобразования Лапласа (3.16) имеем
if
x(s) = Jе-ate-s‘dt = Jе-( s+a))dt О о
(s + a)
Таким образом, е a) o-.
s + a
Таблица 3.1
| Таблица преобразования Лапласа | ||||||||||||||||||||||||||||||||||||||||||||||||
|
3.8.2 Свойства преобразования Лапласа
При использовании преобразования Лапласа необходимо знать и применять его свойства, некоторые из них формулируются следующим образом.
1 Теорема линейности: для любых действительных или комплек-сных постоянных : и В линейной комбинации оригиналов соответствует такая же комбинация изображений
Ax1 (t) + Вх2 (t) О Ах1 (v) + Вх2 (v) , (ЗЛ8)
где xi(t) О хі(?); x2(t) О х2(?).
2 Теорема подобия: умножение аргумента оригинала на любое постоянное положительное число 0 приводит к делению аргумента изображения х(?) на то же число 0:
х (0 W) o х . (3.19)
3 Теорема затухания: умножение оригинала на функцию eat, где а - любое
действительное или комплексное число, влечет за собой "смещение" независимой переменной v:
еаН(/) О х(? - а). (3.20)
4 Теорема запаздывания: для любого постоянного w > 0
5 Теорема дифференцирования по параметру: если при любом значении г оригиналу x(t, г) соответствует изображение х(?, г), то
(3.22)
WI(t, Г) o 3f (?, г)
dr dr
6 Теорема дифференцирования оригинала: если x(t) О х(?), то x'(t) О ?х(?) - x(0) , (3.23)
т.е. дифференцирование оригинала сводится к умножению на ? его изображения и вычитанию x(0).
В частности, если x(0) = 0, то x'(t) О ? х(?). Применяя теорему необходимое количество раз, получают
х(я) (t) О ?"х(?) - ?"-1х(0) - ?"-2х'(0) -... - х(п-1) (0). (3.24)
Если х(0) = х'(0) = ... = х("-1)(0) = 0, то
х(n)(t) О ?"х(?) , (3.25)
т.е. при нулевых начальных значениях я-кратное дифференцирование оригинала сводится к умножению на ?" его изображения.
7 Теорема интегрирования оригинала: интегрирование оригинала в пределах от 0 до t приводит к делению изображения на ?:
х(?)
Jх^)Gt ¦
(3.26)
изображения
8 Теорема дифференцирования изображения: дифференцирование сводится к умножению оригинала на (-t):
-х^) о х'(?). (3.27)
9 Теорема интегрирования изображения: интегрированию изображения в пределах от ? до f соответствует деление оригинала на t, т.е. если интеграл Jх(z)Gz сходится, то
?
. \ f
о [х(?)^? . (3.28)
t
?
10 Теорема умножения изображения: если х(0 о х(?), \(t) о \(?), то свертке функций
х * \ = Jх(т) • \(t - т) Gw (3.29)
0
соответствует произведение изображений
х\ О х(?)\(?). (3.30)
12 Теорема о конечном и начальном значениях функции:
lim x(t) = lim vx(v) ; (3.32)
tOf voO
limx(t) = lim vx(v). (3.33)
WOO VOf
3.8.3 Решение дифференциальных уравнений
Одним из важнейших применений операционного исчисления - преобразования Лапласа -является решение линейных дифференциальных уравнений с постоянными коэффициентами, которыми как раз и описываются рассматриваемые системы автоматического управления.
Решение дифференциального уравнения в этом случае складывается из следующих этапов:
1) преобразование уравнения по Лапласу;
2) отыскание решения в области комплексного переменного v;
3) переход в область действительного переменного путем обратного преобразования Лапласа.
Пример 3.2
a/(t)+di\c(t)+do\(t)=eo 1(t);
у(0) = у’(0) = O.
Преобразуем данное уравнение по Лапласу:
а2v2\(v) + йі?\(?) + aoy(v) = Eo • 1/ v ,
откуда
\(v) =
v(D2 V 2 + DiV + Do)
Пусть полином
a2v2 + a1v + a0 = 0 имеет корни v1 и v2, тогда, как будет показано ниже,
можно записать
V v - v1 v - v2
где С0, С1, С2 - некоторые коэффициенты, определяемые методом неопределенных коэффициентов:
V1V2 v1(v1 - v2 ) v2 (v2 - v1)
Пользуясь таблицами обратного преобразования Лапласа, находим
У(t) = &о + C1eS1‘ + C2eS2‘.
Полученное выражение y(t) является решением линейного обыкновенного дифференциального уравнения второго порядка при входном сигнале x(t) = 1(t), т.е. ничем иным, как переходной функцией для линейного объекта второго порядка.
3.8.4 Разбиение на простейшие дроби
Как видно из примера 3.2, решение дифференциального уравнения, полученное с использованием преобразования Лапласа, представляет собой рациональную дробь. Для облегчения обратного преобразования полученную дробь необходимо разложить на простейшие дроби, пользуясь следующим правилом.
Дробь
0 (v) = м»-М (3.34)
Ф„ (v)
называется правильной рациональной дробью, если порядок числителя меньше, чем порядок знаменателя. Для разложения дроби (3.34) необходимо найти корни уравнения м„(v) = 0 .
Если корень действительный, то ему соответствуют дробь вида
$
V - V1
Если корни действительные кратности к, то им соответствует сумма дробей
к-1
$1 $2 V
$к V
(v - Vi)
V - Vj (V - Vj)
Если корни комплексно сопряженные, то
$jV + В (v 2 + DV + E)
Если корни комплексно сопряженные кратности к, то
$jV + Bj
$2 V + В2
$kV + Bk
(v 2 + av + E)k
(?2 + а? + E) (v 2 + av + E)2
Таким образом, дробь (3.34) можно представить в виде
Mq-1(v) _ $1 , $2
Ф«(?) (? - V1) (? - Vj)2 (? - Vj)k
(? - ?2) (V - V2)
/ \m
(v - V2)
(3.35)
+ Cps + 'p
(V 2 + D1V + E1)P
____. + FqV + Et
(v 2 + D1 v + E1) (v 2 + a^v + E1)2 (v 2 + D1V + E[)T
C1_v + '1
&2V + '2
(v2 + D1V + E1) (v2 + D1V + E1)
F1V + E, F2 V + (2
Коэффициенты Ab ..., An, Bb ..., Bm\ C1, ..., Cp '1,..., 'p F1, ..., Fq, Eb ..., Eq находятся
методом неопределенных множителей. В этом случае правая часть (3.35) приводится к общему знаменателю и получается равенство двух дробей, у которых знаменатели равны, следовательно, должны быть равны и числители. Из равенства последних составляется система алгебраических уравнений для определения неизвестных коэффициентов, которая решается известными методами решения линейных алгебраических систем.
При определении оригинала по полученному изображению пользуются следующими формулами соответствия:
o $HV1W;
V - V1
>$—^ wk-1hV1W ;
к
(v - v1)
(k -1)!
$v + В 2WI T 2 / л В - $a / 2 . fl 2 / л I
2--o e 2 < $ cos HE - a2/4 + , == sin HE - a2 / 4 ).
v2 + av + E I д/e -
Пример 3.3 Найти оригинал, если изображение
a2 / 4 v 2 + 2
(v + 1)3(v - 2)
Данное изображение раскладывается на простейшие дроби:
(v + 1)3(v - 2) V +1 (v +1)2 (v +1)3 V -2'
Правая часть последнего выражения приводится к общему знаменателю, и из условия равенства числителей получают:
Из равенства коэффициентов при соответствующих степенях ? в левой и правой частях записывается система алгебраических уравнений:
A1 + B = 0;
A2 + 3 B = 1;
A3 - A2 - 3 A1 + 3B = 0;
- 2A3 - 2A2 - 2 A1 + B = 2,
решение которой дает A1 = - 2/9; A2 = 1/3; A3= - 1; В = 2/9. Таким образом,
(v + 1)3(v - 2) 9(v +1) 3(v +1)2 (v +1)3 9(v - 2)
Применяя обратное преобразование, записывается выражение для оригинала:
г-1
(V + 1)3(v - 2)
3.9 ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
Одной из основных характеристик объекта управления, используемой в теории автоматического управления, является передаточная функция, записываемая в терминах преобразования Лапласа.
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта y(v) к преобразованному по Лапласу входу o(v) при нулевых начальных условиях.
Передаточная функция определяется только внутренними свойствами системы, является функцией комплексного переменного и обозначается:
: (v) = 4г- (3-36)
[(v)
Передаточная функция характеризует динамику объекта только по определенному каналу, связывающему конкретный вход объекта и конкретный выход (рис. 3.13).
Если объект имеет несколько входов и выходов, то он характеризуется несколькими передаточными функциями, определить которые можно непосредственно, пользуясь определением (3.36).
-21
Пример 3.4 Пусть на вход объекта подается сигнал x(t) = 1(t), а на выходе снимается
сигнал, описываемый функцией y(t) = 2 е
Для определения передаточной функции необходимо определить x(s) =1; y(s) = -2z
v s + 2
2s
s + 2
тогда передаточная функция W (s) =
Как и дифференциальное уравнение, передаточная функция полностью характеризует динамику линейного объекта. Если задано дифференциальное уравнение объекта, то для получения передаточной функции необходимо преобразовать дифференциальное уравнение по
\(s)
x(v)
Лапласу и из полученного алгебраического уравнения найти отношение
В общем случае дифференциальное уравнение объекта представляется в виде
a«y(П) (t) + а«-1 У(«-1) (t) + ••• + a1 y'(t) + ao\(t) =
= bmx(m'>(t) + bm-1x(m-1)(t)+... + b1x'(t) + b0x(t), (3.36, a)
где a«, ..., ao; bm, ..., bo - постоянные коэффициенты.
После преобразования по Лапласу при нулевых начальных условиях получают:
a«s«y(s) + a«-1s«-1 y(s) + ... + a1sy(s) + ao y(s) =
= bmsmx(s) + bm-1sm-1x(s) + ... + bjsx(s) + box(s),
или
(a«s« + a«-1s« 1 + ... + a1s + a0) У(?) = (bmsm + bm-1sm 1 + ... + b1s + b0) ¦ФХ
и тогда
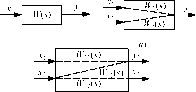 |
|
Рис. 3.13 Примеры различных объектов: а - с одним входом и одним выходом; б - двумя входами и одним выходом; в - двумя входами и двумя выходами |
W (s) = ZM. = bmsm + bm-1s” 1 + - + b1s + b0
W (V) / 4 « «-1
x(s) a«s + a«-1s + ... + a1s + ao
Если известна передаточная функция объекта, то изображение выхода объекта m(s) равно произведению передаточной функции на изображение входа x(s):
y(s) = W(s) x(s). (3.38)
Последняя запись есть не что иное, как общая форма записи решения дифференциального уравнения в операторной форме.
Таким образом, передаточная функция равна отношению двух полиномов:
W (s >=•
где %(s) = bmsm + bm-1sm 1 + ... + b[S + bo ; $(s) = a«s« + a«-1s« 1 +......+ a^ + aoy .
46
Для реальных физических объектов можно отметить как характерную особенность тот факт, что степень полинома B(s) всегда меньше или равна степени полинома A(s), т.е. т < п , так что
lim W(s) = 0 .
SOf
Передаточная функция также взаимно однозначно связана с временными характеристиками.
Если имеется выражение для переходной функции, следовательно, входной сигнал x(t) = 1(t) или x(s) = -, выходной сигнал y(t) = h(t) или y(s) = h(s), и тогда передаточная функция
S
равна
W(s) = -K(s) = sh(s). (3.39)
x(s)
Из (3.39) может быть получено выражение для переходной функции через преобразование Лапласа:
h(s) = W(S). (3.40)
S
Если известно выражение для весовой функции, то входной сигнал x(t) = 5(t) или x(s) = 1, выходной сигнал w(t) и, следовательно,
W (S) = Z(S) = z(s), (3.41)
x(S)
т.е. выражение для передаточной функции есть не что иное, как преобразование Лапласа от весовой функции.
Пример 3.5 Пусть объект описывается дифференциальным уравнением
y(t) + 3y'(t) + 4y(t) = 2x(t); y(0) = y'(0) = 0 . Найти K(s) и w(s).
Применяя преобразование Лапласа: s2y(s) + 3sy(s) + 4y(s) = 2x(s), определяем передаточную
функцию W (s) =
. Переходная функция h(s) =
-1
s(s 2 + 3s + 4)
s(s 2 + 3s + 4)
s 2 + 3s + 4
2
s 2 + 3s + 4
2 ; s 2 + 3s + 4’
Весовая функция z(s)
3.10 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 Математическая модель объекта управления или системы управления устанавливает взаимосвязь между входными и выходными переменными. Различают уравнения статики и уравнения динамики. Установлено, что различные по физической природе объекты управления обладают некоторыми общими чертами и описываются однотипными уравнениями с точки зрения математики.
: Какие уравнения называются уравнениями статики"
Что представляет собой статическая характеристика?
B Какие уравнения называются уравнениями динамики?
С Какими уравнениями описываются объекты управления: гидравлический резервуар, электрическая емкость, непрерывный изотермический химический реактор полного перемешивания?
2 Один из классов систем, которые рассматривает теория автоматического управления -это линейные стационарные системы, подчиняющиеся принципу суперпозиции. Основной задачей изучения динамического поведения этих систем является умение рассчитать выходной сигнал для любого известного входного сигнала, т.е. рассчитать динамику системы. С этой целью используются динамические характеристики. Основными временными характеристиками, которые, как правило, получают экспериментально, являются переходная функция и весовая функция.
: Как доказать, что система является линейной системой?
В Какие характеристики относятся к динамическим характеристикам?
С Что представляет собой схема расчета динамики с помощью временных характеристик?
3 Основным математическим аппаратом, используемым в теории автоматического управления, является преобразование Лапласа, с помощью которого записывается основная динамическая характеристика объекта управления - передаточная функция.
: Дайте определение преобразования Лапласа. Сформулируйте основные свойства.
В Запишите в терминах преобразования Лапласа дифференциальное уравнение
4/'(0 + 2у c(t) + у'(t) + 2y(t) = sin t, у(0) = 0 , у'(0) = 1, у''(0) = 0 .
С Какая характеристика называется передаточной функцией?
3.11 ТЕСТ
1 Какое из уравнений является уравнением динамики?
: )(у, у, 0, [, х)+/=0.
В )(у, у, у, х, X) + / = 0.
С )(/0, 0, 0, Х0, 0) + / = 0.
2 Каким дифференциальным уравнением описывается динамика таких объектов управления, как электрическая емкость, химический реактор полного перемешивания?
: rGy(t)+y(t) = kx(t). dt
в 7?ш+72ddtl+м0=k„t).
dt2 dt
С тШ + y(t) = k^.
Gt Gt
3 Математическая запись принципа суперпозиции состоит из следующих соотношений
у(а x(t)) z а y(x(t)).
X [ (t) =X Уі (x* (t));
у(а x(t)) z а y(x(t)).
у X x(t) =X у*- (xL(t));
У (а x(t)) = а y(x(t)).
4 Какая динамическая характеристика называется переходной функцией? А Реакция системы на единичный ступенчатый сигнал.
В Реакция системы на 5-функцию. с Реакция системы на гармонический сигнал.
5 Каким соотношением устанавливается связь между переходной функцией и весовой функцией?
а h(t) = w'(t).
В K(t) = Jw(t) dt . о
C K(t) = w(t) + w'(t).
6 Какую связь устанавливает интеграл Дюамеля?
: Между входным и выходным сигналом произвольной формы.
В Между переходной функцией и весовой функцией.
C Между входным сигналом произвольной формы и выходным сигналом.
7 Какое преобразование называется преобразованием Лапласа?
Л x(v) = Jx2(t) e~s‘dt . о
В x(v) = Jx(t) e stdt . о
C x(v) = Jx(t) e mtdt . о
8 Какая характеристика называется передаточной функцией?
А Отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу входному сигналу.
В Отношение выходного сигнала к входному при нулевых начальных условиях.
C Отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу выходному сигналу при нулевых начальных условиях.
Если известна передаточная функция, то переходная функция определяется как ...
W (?)
А K(O) = 17
В h(O) = rl[sW(?)]. C h(O) = I71[W'(?)].
10 Какой интеграл называется интегралом Дюамеля?
f
: \(t) = Jz(t -x)x(t)Gw .
0
f
В \(t) = JZ(t -x)x(t) Gx.
0
f
K \(t)=J z(t) x(x) Gx .
0
4 ЧАСТОТНЫЙ метод исследования линейных систем
4.1 элементы теории функции комплексного переменного
Комплексным числом называется число, определяемое соотношением z = а + і Ъ, где а и Ъ - соответственно действительная и мнимая части числа. Такая форма записи комплексного числа называется алгебраической. На комплексной плоскости, в координатах Яе (действительная часть) и Іт (мнимая часть), комплексное число геометрически представляется вектором (рис. 4.1); оно может быть изображено также в полярных координатах М (модуль) и ф (фаза) и записано в показательной форме: z = Меіф, где М -длина вектора, соединяющего начало координат с точкой z; ф - угол между положительной ветвью действительной оси и вектором z, причем положительным направлением считается направление отсчета против часовой стрелки.
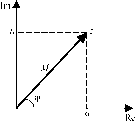 |
| Рис. 4.1 Изображение комплексного числа |
Все составляющие комплексного числа связаны между собой следующими соотношениями (рис. 4.15):
V2 о Ъ
а + Ъ ; ф = arctg—; а = М cos ф; Ъ = М sin ф . а
При вычислении фазы (аргумента) числа необходимо учитывать, в каком квадранте находится точка z. Ниже приводятся формулы, по которым вычисление фазы ф сводится к
Іт z Re z
(рис. 4.2).
определению острого угла, равного arctg
І квадрант: z1 = а + іЪ, ф1 = arctg —;
а
ІІ квадрант: z2 =-a + ib, Ф2 = arctg-= n- arctg— = — + arctg — ;
квадрант: z3 = -a - ib, Ф3 = arctg-= n + arctg— =--arctg— ,
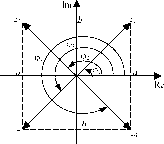 |
| Рис. 4.2 Определение фазы в зависимости от расположения вектора z |
1 J0. 1 in. • An /2. -in /2
1 = е ; -1 = е ; i = е ; -1 = е .
Над комплексными числами проводят те же арифметические операции (сложение, вычитание, умножение, деление), что и над действительными. Сложение и вычитание более удобно проводить над комплексными числами, записанными в алгебраической форме:
z3 = Z1 ± z2 = (ai ± ibi) ± (a2 ± ib2) = (ai ± a2) ± i(b2 ± bi) ,
а умножение и деление над числами, записанными в показательной форме:
z3 = z1z2 = М 1ei'Ml М2eiM2 = М1М2ei(Ml +Ф2); z3 = z1 / z2 = М1еіф1 / М2eiM2 = М1 / М2ei(Ml -ф2).
Если аргумент функции - комплексное число, то функция является функцией комплексного переменного. Например, функция W(s), s = а + iz.
Таким образом, можно сказать, что функцией комплексного переменного называется некоторый оператор (правило), согласно которому
а)
б)
Іті
i ю.
:(аТ)Щ(0)
a1
Re
Рис. 4.3 К определению функции комплексной переменной
точке одной плоскости комплексного переменного ставится в соответствие точка другой
плоскости комплексного переменного (рис. 4.3).
Если функция относится к классу аналитических функций (непрерывная, гладкая, почти всюду дифференцируемая), то такая функция подчиняется принципам конформного отображения, основными свойствами которого являются следующие:
1 Линия одной комплексной плоскости s отображается в линию другой комплексной плоскости W(s) (рис. 4.4).
2 Бесконечно малый угол отображается в такой же бесконечно малый угол, углы при этом сохраняются (рис. 4.4).
3 Бесконечно малый треугольник отображается в такой же равный ему бесконечно малый треугольник. Направление обхода углов сохраняется. Внутренняя область одного треугольника преобразуется во внутреннюю область другого треугольника (рис. 4.4).
| а) | 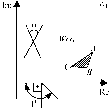 |
4.2 ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Важную роль при описании линейных систем играют частотные характеристики, характеризующие реакцию объекта (системы) на гармонический сигнал.
Основной частотной характеристикой является амплитудно-фазовая характеристика (АФХ), которая может быть определена через конформное отображение.
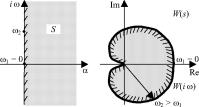 |
| Рис. 4.5 К определению АФХ |
Амплитудно-фазовая характеристика является комплексной функцией, поэтому она может быть, как и любая комплексная функция, представлена в показательной форме
W (ію) = М (ю)еіф(ю) (4.1)
и в алгебраической форме
W(ію) = Яе(ю) + LІт(ю). (4.2)
Модуль М(ю) в показательной форме записи АФХ называется амплитудно-частотной характеристикой (АЧХ), а фаза или аргумент ф(ю) называется фазо-частотной характеристикой (ФЧХ).
Действительная часть амплитудно-фазовой характеристики 5е(ю) называется вещественной частотной характеристикой (ВЧХ).
Мнимая часть амплитудно-фазовой характеристики Іт(ю) называется мнимой частотной характеристикой (МЧХ).
Между всеми частотными характеристиками существует связь (рис. 4.1). Зная одни из них, можно определить другие, т.е.
М(ю) = д/Re2(ra) + Іт2 (ю) ,
. . Іт(ю)
ф(ю) = arctg-
(4.3)
(4.4)
Re(ra)
Re(®) = М(ra)cosм(ю), (4.5)
Іт(ю) = М(ю) sin ф(ю). (4.6)
4.3 СВЯЗЬ ПРЕОБРАЗОВАНИЙ ЛАПЛАСА И ФУРЬЕ
Как известно, любая линейная стационарная система автоматического управления описывается обыкновенным дифференциальным уравнением, которое в операторной форме имеет вид
(anS" + an-1S”1 + ... + a1S + а0 )\(v) = (ErnV” + Ern-1V” 1 + ... + bls + b0 )[(v) , (4•7)
где \(v) = Jy(t)e s‘dt - преобразование Лапласа функции \(W).
0
Преобразование Фурье функции y(t) определяется выражением у(ію) = Jy(t)e~iZdt, причем
0
f
должны выполняться условия, что y(t) = 0 при t < 0 и Jy(t)dt существует.
0
Сравнивая преобразования Лапласа и Фурье, видно, что формально оно может быть получено из преобразования Лапласа простой заменой ? на ію, но из-за второго условия преобразование Фурье выполняется для более ограниченного класса функций. Заменяя в уравнении (4.9) ? на ію, получаем:
(an (ію)п + an _1(ію)п-1 + ... + а1(ію) + a0) у(ію) =
= (bm(ію)” + bm- 1(ію)”_1 + ... + ь1(ію) + bo)[(iю),
откуда
:(ію) = [(ію) = bm (ію)Р + bm-1(ію)Р-1 + ••• + Ь1(ію) + b0 (4 g)
у(ію) ап (ію)п + ап-1(ію)п-1 + ... + а1(ію) + а0
Проводя анализ выражения (4.g), можно записать, что
:(ію) = %(ю) + і%1(ю) = Мч (ю)еіфЧ(ю)
$(ю) + і $1 (ю) М зн (ю)еіфзн (ю)
,,, ч Мч(ю)
и сделать вывод: амплитудно-частотная характеристика М(ю) = —является четной
Ман (ю)
функцией; фазо-частотная характеристика ф(ю) = фч(ю) - фзн(ю) - нечетной функцией; вещественная частотная характеристика Re(z) - четной функцией; мнимая частотная характеристика Іт(ю) - нечетной функцией (рис. 4.6 и 4.7).
 | а) |
| б) |
 |
а - АЧХ; б - ВЧХ
б)
Іт ^
Рис. 4.7 Свойство нечетности частотных характеристик:
а - ФЧХ; б - МЧХ
Амплитудно-фазовая характеристика также может рассматриваться как изображение Фурье от весовой функции:
(4.9)
w(lz) = Jz(w)e-iZ‘dt.
Так как е iZt = cosюt - Lsinюt, то из (4.9) могут быть получены формулы для определения вещественной и мнимой характеристик:
W(ію) = Jz(t){cos zt - i sin zt'dt,
и, следовательно,
Re(z) = Jz(t)cos юtdt, о
Іт(ю) = - Jz(t) sin ztdt. о
(4.12)
(4.10)
(4.11)
Из последних формул следует, что
Re(z) = Re(-z), Іт(ю) = - Іт(-ю).
 |
| Рис. 4.8 Годограф АФХ |
При практических расчетах обычно ограничиваются построением АФХ только для положительных частот. Используя формулу обратного преобразования Фурье, можно по АФХ получить весовую характеристику:
1 f
— JW Й'®>
(4.13)
z(t)
Пример 4.1 Пусть задана передаточная функция объекта W(?) = —^-, требуется
V 2 + 2? + 3
определить частотные характеристики.
Заменяя ? на гю, записываем выражение для АФХ:
W (Ію) =-2-=-2-.
(гю)2 + 2(гю) + 3 (3 - ю2) + 2гю
Так как рассматриваемый объект линеен и стационарен, то, применяя принцип суперпозиции, имеем:
?(3 -ю2)2 + 4ю2
АЧХ (рис. 4.9, а) М(ю) =
ФЧХ (рис. 4.9, [) ф(ю) = -ю- arctg-2 .
3 - ю2
Годограф амплитудно-фазовой характеристики изображен на рис. 4.9, в.
Вещественную и мнимую частотные характеристики обычно получают умножением
числителя и знаменателя на выражение, сопряженное знаменателю:
ггг/ . е-ію cos ю- і sin ю (3 -ю2) - 2гю
: (гю) =---=-------=
(3 -ю 2) + 2ію (3 -ю2) + 2ію (3 -ю 2) - 2гю
(3 - ю2) cos ю - 2ю sin ю - і((3 - ю2) sin ю + 2ю cos ю)
(3-ю 2)2 + 4ю 2
откуда
- вещественно-частотная характеристика:
Яе(ю)
(3 - ю2)cos ю- 2ю sin ю (3 - ю2)2 + 4ю2
- мнимая частотная характеристика:
 |
|
Рис. 4.9 Графики частотных характеристик: а - АЧХ; [ - ФЧХ; в - АФХ |
(3 - ю2) sin ю + 2ю cos ю (3 - ю2)2 + 4ю2
4.4 СВЯЗЬ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ЧАСТОТНЫМИ ХАРАКТЕРИСТИКАМИ
Решение дифференциального уравнения (3.36, а) имеет вид
\(t) = \св (t) + \вын (tЬ (4.14)
где \вын(^) - вынужденное движение, описываемое частным решением; \свЦ) - свободные движения, описываемые общим решением однородного уравнения.
Для установления связи между АФХ и дифференциальным уравнением рассматриваются вынужденные движения при входном гармоническом воздействии вида: x(t) = 2А cosюW, которое можно представить по формуле Эйлера x(t) = Аеію‘ + Ае-ію‘ и рассматривать как сумму входных сигналов, т.е. x(t) = ^(t) + x2(t).
В этом случае частное решение дифференциального уравнения в силу принципа суперпозиции также представляется в виде суммы
\вын (t)= \вын1 (t)+ \вын 2 (t) ,
где \ (t)и\вын2(t)определяются соответственно видом х1(і) и X2(t). В связи с этим решения будут искаться в виде
\вын1 (t) = AW(iz)ei0Z; \вын2(t) = AW(-iz)e-iZi ,
где W(iz), W(-iz) - некоторые неизвестные функции, не зависящие от і, подлежащие определению.
Для нахождения W(iz) \ (t) дифференцируется п раз, а х1(і) - m раз и подставляются в
исходное дифференциальное уравнение, в результате получают
AW (iZ)e'Zt [Dn(ію)П + Dn-i(iz)n-1 + ••• + Di(iz) + Do] = (4 15)
= AeiZt [Em (iz)m + Em-1(iz)m-1 + ••• + E1(i®) + E0]
Полученное выражение (4Л5) полностью совпадает с полученным ранее выражением (4^8) для АФХ и еще раз подтверждает тот факт, что амплитудно-фазовая характеристика может быть получена простой заменой переменной ? на
Функция W(-iz) получается аналогичным образом по формуле (4Л5) заменой iz на (-ію^
Записывая полученные выражения для комплексных функций W(iz) и W(-iz) в показательной форме
W(ію) = М (ю)еім(ю); W(-ію) = М (ю)е-ім(ю),
частное решение уравнения (4Л) преобразуется к виду
\вын (і) = AM(ю)[еім(ю)еіюі + e-iM(z)e-іюі ] = 2AM(z)cos[zt + ф(ю)] •
Сравнение \вын(і), описывающего установившиеся колебания на выходе объекта, с входным сигналом х(і) показывает, что отношение амплитуд выходных и входных колебаний
равно -= М(ю) , а это как раз и есть амплитудно-частотная характеристика; разность
2A
фаз [юt + ф(ю)] -юt = ф(ю) - фазо-частотная характеристика^
С изменением частоты колебаний амплитудно- и фазо-частотные характеристики изменяются по определенному закону в зависимости от физических свойств объекта^ Однако все реальные физические системы обладают одним общим свойством, которое заключается в том, что при увеличении частоты входных колебаний выше некоторого предела (частоты среза) юср объект практически не реагирует на эти колебания, т^ амплитуда выходных колебаний равна нулю^ Таким образом, для любого реального объекта lim М (ю) = 0 •
4.5 ФИЗИЧЕСКИИ СМЫСЛ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Физический смысл частотных характеристик устанавливается при их экспериментальном определению
Пусть на вход линейного объекта подается гармонический сигнал вида x(t) = $sinzt. На выходе объекта в установившемся режиме (собственное движение прекратилось) в силу принципа суперпозиции будет наблюдаться также гармонический сигнал с частотой, равной частоте входных колебаний, сдвинутый относительно них по фазе и другой амплитуды (рис. 4.10), т.е. \(t) = %sin(zt + ф).
Степень различия между параметрами входных и выходных гармонических сигналов не зависит от амплитуды и фазы входного сигнала, а определяется только динамическими свойствами самого объекта и частотой колебаний, поэтому в качестве динамических характеристик объекта здесь и используются рассмотренные выше частотные характеристики. Для получения последних экспериментальным путем проводится ряд опытов, для которых используется аппаратура в составе генератора гармонических колебаний с регулируемой частотой и устройства для измерения амплитуды и фазы колебаний.
В результате проведенных экспериментов частотные характеристики определяются следующим образом.
Амплитудно-частотная характеристика (АЧХ) - отношение амплитуды выходных колебаний к амплитуде входного сигнала:
М (ю) = — . (4.16)
$
Фазо-частотная характеристика (ФЧХ) - разность фаз выходных и входных колебаний:
ф(ю) = фвых - фвх (4.17)
или
ф(ю) = -'yt 2л ,
где At(ю) - время сдвига.
Таким образом, амплитудно-фазовая характеристика (АФХ) может быть определена как комплексная функция, для которой АЧХ является модулем, а ФЧХ - аргументом. Последние соотношения как раз и определяют физический смысл частотных характеристик.
Имея в своем распоряжении амплитудно-фазовую характеристику, снятую экспериментально, и входной сигнал, можно записать выходной сигнал. Например, АФХ задана годографом (рис. 4.11), на вход подается сигнал x(t) = 2 sin0,5t + 3 cos0,1t - 0,8 sin10t.
|
х(0 Объект а) |
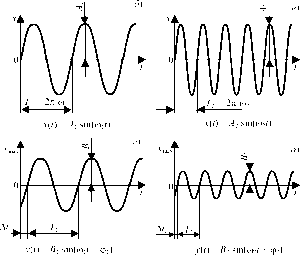 |
->
|
Рис. 4.10 Экспериментальное определение частотных характеристик: а - объект; [ - входной сигнал частоты юц в - входной сигнал частоты ю2; г - выходной сигнал частоты юц д - выходной сигнал частоты ю2 |
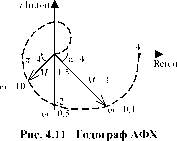 |
y(W) = 4sin(0,5W - л/2) + 9 sin(0,1W - л/4) - 1,2 sin(10W - (3л/2)).
4.6 МИНИМАЛЬНО-ФАЗОВЫЕ СИСТЕМЫ
Амплитудно-фазовую характеристику системы можно записать не в виде (4.8), а, воспользовавшись теоремой Безу, как
П (iz — Tj)
: (iz) = kJl-, (4.18)
П (iz— sj)
J=1
где T/ - нули, a S/ - полюсы передаточной функции.
Числитель функции (4.18) представляет собой произведение сомножителей (iz - т/ )• Геометрически эта разность является вектором, начало которого лежит в точке т/, а конец -на мнимой оси в точке iz (рис. 4.12). Сравнение двух векторов(ію - т/) и (iz - т/'), один из которых т/ лежит в левой полуплоскости и характеризуется фазой ф', а другой т/' - в правой полуплоскости и характеризуется фазой ф'' , показывает, что при одном и том же модуле всегда ф ' < ф '' , т.е. для вектора, лежащего в левой полуплоскости, фаза меньше.
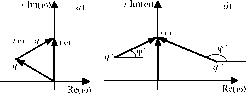 |
| Рис. 4.12 К определению минимально-фазовых систем |
Системы (звенья), у которых хотя бы один нуль или полюс передаточной функции лежит в правой полуплоскости (действительная часть нулей, полюсов является положительной величиной - Re т/ > 0; Re S/ > 0), называются неминимально-фазовыіми.
Можно показать, что для минимально-фазовых звеньев существуют зависимости:
I "f im<z) G„;
S J и -z
—f
1 " Re(z) Gu; •
S J u —z
—f
Re(z)
(4.19)
Im(z)
| M(z) |  |
z
Эти зависимости показывают, что амплитудно-фазовая характеристика минимальнофазовой системы (звена) полностью определяется ее ВЧХ, МЧХ или АЧХ. Это позволяет значительно упростить задачи анализа и синтеза рассматриваемых систем, ограничиваясь изучением их ВЧХ или АЧХ.
Неминимально-фазовую систему в простейшем случае можно представить в виде последовательного соединения минимально-фазовой системы и звена, имеющего один нуль в правой полуплоскости и, соответственно, характеризующегося АФХ:
:'(iz) = ¦iz—е*. (4.20)
iz + т Т + iz
Амплитудно-частотная характеристика этого звена F(—) = 1, а фазо-частотная -ф'(—) = к-arctg —. Таким образом, рассматриваемое звено сохраняет амплитуду выходного
гармонического сигнала равной амплитуде входного сигнала при любой частоте, фаза же при изменении частоты от 0 до f меняется в интервале от к до 0, т.е. включение звена с АФХ W(L—) приводит к добавлению положительного сдвига фазы ф'(—), который при і— о 0 равен к и уменьшается при возрастании частоты.
Подобные звенья на практике используются для корректирования фазовых характеристик цепей, для повышения устойчивости и т.д.
4.7 ПОНЯТИЕ О ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИКАХ
Кроме рассматриваемых выше частотных характеристик, иногда используют, так называемые, логарифмические частотные характеристики (ЛЧХ). Для их получения выражение АФХ (4.15) записывается в виде
Em (і—)т + ... +1
No 0 o(—)hLm(—1
W (і—)
El _Eo_
Do ^(і—)" + ... +1
D0 и логарифмируется
lg W(L—) = lg No + lg 0о (—) + іф(—) lg e .
Для оценки отношения двух величин используется логарифмическая единица - децибел. Связь между числом децибел 6дб и некоторым числом N дается формулой
6дб = 20 lg N = LmN .
Характеристика
L(—) = Lp[No0o(—)] = LmN0 + Lm0o(—) = 20lg 0 (—) (4.21)
называется логарифмической амплитудной частотной характеристикой (ЛАЧХ).
При построении логарифмических частотных характеристик по оси абсцисс откладывается частота в логарифмическом масштабе - lg—, поэтому логарифмическая амплитудная частотная характеристика строится в координатах L(—); lg—, логарифмическая фазовая частотная характеристика (ЛФЧХ) - ф(—); lg— (рис. 4.13). Логарифмические частотные характеристики называют также диаграммами Боде.
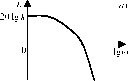 | ФА |
| б) |
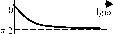 |
а - ЛАЧХ; б - ЛФЧХ
4.8 ВЗАИМОСВЯЗЬ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Основной динамической характеристикой объекта или системы является дифференциальное уравнение. Кроме него могут применяться:
1) передаточная функция;
2) частотные характеристики: амплитудно-частотная, фазо-частотная, амплитуднофазовая;
3) переходные характеристики: переходная функция, весовая функция.
Любая из этих характеристик может быть определена, если известно дифференциальное уравнение объекта. Но, несмотря на это, следует еще раз остановиться на их взаимосвязи.
В качестве примера рассмотрим взаимосвязь между переходной функцией и другими характеристиками.
Если известна переходная функция h(t), то по формуле (3.39) определяется передаточная функция объекта W(v) = s-h(s), заменой ? = iz в которой, в свою очередь, могут быть получены частотные характеристики: W(iz) = (iz) h(iz).
Так как 5(W) является производной от единичной ступенчатой функции, то для линейных систем весовая функция является производной от переходной функции, т.е. w(t) = h'(t).
Дифференциальное уравнение по экспериментально снятой кривой разгона получают с помощью различных методик, позволяющих определить его коэффициенты.
Связь между основными характеристиками приведена в табл. 4.1.
Таблица 4.1
Взаимные соответствия динамических характеристик
Дифференциальное
уравнение
(t) + d„_iДО + ... + aiy'(t) + d0y(t) = - bmx^m\t) + bm_ix^m_' (t) + ... + bix'(t) + E0 x(t)
|
при нулевых A(v) Y(v) = B(v) X(v) начальных условиях $(?) - ans" + a„_1sn_1 + ...+ a1s + a0; B(v) - bmsm + bm_1vm_1 +...+ bxs + b0 | |||||||||||||||||||||||||
|
y(f)
(4.22)
но, так как y(f) - lim y(t), то
t Of
lim y(t)
К - tOf_
A
Используя теорему о конечном значении функции
lim y(t) = lim sy(s),
t Of so 0
, Ч ГТГ/ \ W (s) $
где y(s) = W(s);(s) = —, можно записать, что
s
lim y (t) = lim sW (s) $ = $ lim W (s).
tof soO s soO
При единичном ступенчатом воздействии : = 1 и тогда
lim y(t) = lim W (s) = —.
t Of soO Do
4.9 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 Основной частотной характеристикой является амплитудно-фазовая характеристика (АФХ), которой называется конформное отображение мнимой оси плоскости корней характеристического уравнения на плоскость АФХ. Амплитудно-фазовая характеристика является комплексной функцией и может быть записана в показательной форме
W (і ю) = М (ю) H м(ю)
и алгебраической форме
W (і ю) = йе(ю) + i Im(ra),
где М(ю) называется амплитудно-частотной характеристикой (АЧХ); ф(ю) - фазо-частотной характеристикой (ФЧХ); Re(z) - вещественно-частотной характеристикой (ВЧХ); Im(z) -мнимой частотной характеристикой (МЧХ). Между этими характеристиками существует связь.
: Сформулируйте основные свойства конформного отображения.
В Если известны АЧХ и ФЧХ, то каким образом определяется ВЧХ и МЧХ?
С Как перейти от ВЧХ и МЧХ к АЧХ и ФЧХ?
2 Частотные характеристики могут быть получены экспериментально в результате подачи на вход объекта гармонического сигнала, а также теоретически в передаточной функции комплексного пара-метра s на ію.
: Какие частотные характеристики получают экспериментально?
запишите амплитудно-фазовую
В Задана передаточная функция W(s) =
характеристику в показательной и алгебраической форме.
С Задано дифференциальное уравнение объекта управления y”(t) + 4y'(t) + 4y(t) = 3x(t), запишите амплитудно-фазовую характеристику.
3 Амплитудно-фазовая характеристика связана с другими динамическими
характеристиками.
: Как определить весовую функцию по амплитудно-фазовой характеристике?
В Как определить АФХ по переходной функции?
С Задана весовая функция w(t) = е, запишите АФХ.
4.10 ТЕСТ
С В треугольник.
2 Амплитудно-фазовая характеристика является...
: Случайной функцией.
В Комплексной функцией.
С Детерминированной функцией.
3 Как экспериментально получают частотные характеристики" Подачей на вход объекта.
: Гармонического сигнала x(t) = $sin zt.
В 5-функции - x(t) = 5(t).
С Единичного ступенчатого сигнала x(t) = l(t).
4 Как перейти от передаточной функции к частотным характеристикам? Положив...
: v = iz.
В v = z .
С v = eiZt .
5 Если передаточная функция объекта управления W(v) = — + v, то АФХ в показательной форме запишется.
: W(iz) = -e-iarctgZ .
Z
-l —
e 2
В W(iz) С W(iz)
к -z2
к -z2 -i02+arctg^NJ
-e v J
Z
6 Если передаточная функция объекта управления W(v) = 3e 4v, то амплитудно-частотная характеристика запишется как.
: М (z) = 3e-4z .
В М(z) = ^/sin4z + cos4z .
С М (z) = 3 .
2
7 Если передаточная функция объекта управления W(v) =-, то фазо-
4v (v + 3)(5v + 2)
частотная характеристика запишется как.
. . . s z 5 z
: ф(х) = - — - arctg — - arct^^ .
В ф( х)
+ arctg z- arctg
arctg
С ф(х)
arctg z - arctg
arctg
8 Если передаточная функция объекта управления W(v) = 4 + v, то вещественночастотная характеристика запишется.
: Re(z) = ^І16 + z2 .
В Re(z) = 4. С Re(z) = Z .
9 Если переходная функция h(t) = t , то АФХ записывается...
1 -і-
: w(т) = — н 2.
Z
В w(iz) = .
Z2
С W(iz) = z e 2 .
10 Амплитудно-частотная характеристика представляет собой...
: Отношение выходного сигнала к входному сигналу.
В Отношение фаз выходного и входного сигналов.
С Отношение амплитуды выходного сигнала к амплитуде входного.
5 СТРУКТУРНЫЙ АНАЛИЗ ЛИНЕЙНЫХ СИСТЕМ
5.1 ЗВЕНО НАПРАВЛЕННОГО ДЕЙСТВИЯ
При исследовании систем управления первостепенное значение приобретает характер преобразования сигналов в отдельных элементах, или звеньях. Динамические системы, передаточные функции которых имеют вид простых дробей, называются типовыми или элементарными звеньями. Любой промышленный объект представляется в виде связанных между собой типовых звеньев. Их основу составляет звено направленного действия, основное свойство которого заключается в том, что выходная величина \(t) зависит от входной величины x(t), но обратное воздействие выхода на вход отсутствует. Присоединение к выходу такого звена другого звена не изменяет передаточной функции первого звена. Физическая природа звена направленного действия может быть любой. Характеризуется оно соответствующим уравнением движения, которое и определяет конкретный тип элементарного звена.
Различают следующие звенья: усилительное, интегрирующее, идеальное и реальное дифференцирующие, форсирующее, чистого запаздывания, инерционно-форсирущее, апериодические первого и второго порядка, колебательное, которые по ряду общих закономерностей можно разделить на следующие группы:
1 Статические звенья, у которых статическая характеристика отлична от нуля, имеют однозначную связь между входной и выходной переменными в статическом режиме. К ним относят усилительное, апериодическое, колебательное звенья, у которых передаточный коэффициент связан с передаточной функцией соотношением N = W(?)|?=0. Кроме того,
статические звенья являются фильтрами низкой частоты, исключение составляет усилительное звено.
2 Дифференцирующие звенья, у которых статическая характеристика равна нулю, - это идеальное и реальное дифференцирующие звенья; в их передаточную функцию всегда входит сомножитель ?, поэтому W(?)|?=0 = 0 . Дифференцирующие звенья являются фильтрами
высокой частоты, они вносят положительные фазовые сдвиги.
3 Астатические звенья - звенья, не имеющие статической характеристики, к ним относится интегрирующее звено, в передаточную функцию которого обязательно входит
сомножитель —, поэтому W(0) = f. Интегрирующие звенья являются фильтрами низкой
частоты.
5.2 ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
5.2.1 Усилительное звено
Усилительное звено называют также статическим (безынерционным). Примером его может служить клапан с линеаризованной характеристикой в системах регулирования, различные усилители, рычажные передачи, редукторы и т.д. Это звено мгновенно и без искажений воспроизводит входную величину на выходе.
Уравнение движения усилительного звена имеет вид
где k - коэффициент усиления.
Передаточная функция усилительного звена получается в результате преобразования по Лапласу его уравнения \(v) = kx(v), откуда
x(v)
Подстановка v = (гю) дает выражение АФХ
отсюда АЧХ:
ФЧХ:
Графики частотных характеристик (АЧХ, АФХ) представлены на рис. 5.1.
Частотные характеристики усилительного звена не зависят от частоты, причем ФЧХ тождественно равна нулю, т.е. в гармонических колебаниях, поданных на вход, изменяется только амплитуда в k раз. Амплитудно-фазовая характеристика является положительным действительным числом, ее график представляет собой точку на положительной ветви действительной оси.
г Іт(ю) ^
мА
б)

йе(ю)
Рис. 5.1 Частотные характеристики усилительного звена:
а - АЧХ; б - АФХ
|
xA б) l5(W) | ||||
|
| N 8(0 | ||||||
|
я - переходная функция; б - весовая функция
Временные характеристики можно получить непосредственно из уравнения (5.1). Если входной сигнал x(t) = 1 (t), то получают уравнение переходной функции
K(t) = N1(t), (5.6)
она равна постоянной величине - коэффициенту усиления звена. Если же x(t) = 8(t), то получают уравнение весовой функции
w(t) = N8(t). (5.7)
Графики временных характеристик изображены на рис. 5.2.
5.2.2 Интегрирующее звено Уравнение движения интегрирующего звена имеет вид
я)
(5.8)
\(t)
1 г
— Jx(w)Gw , или 7И y'(t) = x(t); m(0) = 0,
7и о
Ти - постоянная времени звена.
Выходной сигнал интегрирующего звена равен интегралу по времени от входного сигнала, умноженному на коэффициент
Примером интегрирующего звена являются счетчики, суммирующие расход вещества или энергии за определенный промежуток времени, уровень в емкости и т.п.
Передаточная функция интегрирующего звена получается в результате преобразования по Лапласу (5.8):
Тиv\(v) = x(v) ^ W(V) = -^. (5.9)
Ти V
і Іт(ю)А
 | фа |
| б) |
 |
Ю-
->
Re(ffl)
-s/2
W(i ю)
Рис. 5.3 Частотные характеристики интегрирующего звена:
я - АЧХ; б - ФЧХ; в - АФХ
Частотные характеристики образуются в результате подстановки ? изображены на рис. 5.3:
ію; их графики
- АФХ

1
7иЮ
(5.10)
(5.11)
(5.12)
: (ію) = — Тит
- АЧХ
- ФЧХ
1 ,
?> ’
М (ю)
Ф(ю) = -s/2 .
Амплитудно-частотная характеристика интегрирующего звена является
гиперболической функцией частоты, а фазо-частотная не зависит от частоты и равна - -2. В
этом случае АФХ является мнимой функцией частоты, и ее годограф для положительных частот совпадает с отрицательной ветвью мнимой оси.
Переходные характеристики, графики которых изображены на рис. 5.4, определяют из уравнения движения (5.8) подстановкой входного сигнала х(і) = 1(і) и х(і) = 5(і) соответственно для получения выражения:
- переходной функции
К(і ) = 7г Idt = w; (5.13)
- весовой функции
z(t) = 7^ I5(t)dt = 7г. (5.14)
7и 0 7и
 |
wA 7 и |
>>
і
Рис. 5.4 Переходные характеристики интегрирующего звена:
а - переходная функция; б - весовая функция
Таким образом, при подаче на вход интегрирующего звена постоянного неисчезающего возмущения выходная координата увеличивается до бесконечности с постоянной скоростью, т.е. отличительной особенностью является тот факт, что переходная функция не имеет установившегося (при t o f) конечного значения. Это свойство является причиной принципиального отличия астатических систем автоматического регулирования, содержащих интегрирующее звено, от статических систем, которые не содержат этого звена.
Реакция на 5-функцию является ступенчатой функцией с амплитудой .
5.2.3 Идеальное дифференцирующее звено
Уравнение идеального дифференцирующего звена
y(t) = kx'(t), (5.15)
т.е. изменение выходной координаты пропорционально скорости изменения входной координаты. В операторной форме уравнение имеет вид \(v) = ksx(s), откуда передаточная функция
(5.16)
= kv .
; (v)
Частотные характеристики, графики которых представлены на рис. 5.5: - АФХ
:(ію) = k ію = kzQm/2;
(5.17)
- АЧХ
М( ю) = kz;
(5.18)
- ФЧХ
(5.19)
м(ю)=f
в)6)
 |
мА 2 " О |
>•
Re
Рис. 5.5 Частотные характеристики идеального дифференцирующего звена:
а - АЧХ; 6 - ФЧХ; в - АФХ
Таким образом, АЧХ прямо пропорциональна частоте, а ФЧХ не зависит от частоты и равна
S. Следовательно, годограф АФХ при ю > О совпадает с положительной ветвью мнимой оси.
Переходная функция идеального дифференцирующего звена имеет вид:
K(t) = k1' (t) = k5(t), (5.2О)
т.е. представляет собой 5-функцию с площадью, равной k.
Весовая функция представляет собой производную от 5-функции:
z(t) = k5'(t). (5.21)
В природе идеально дифференцирующих звеньев не существует, так как при ю o f М(ю) o f, а любой реальный объект практически фильтрует гармонические сигналы с частотой, большей частоты среза данного объекта. Неосуществимость идеального звена видна также и из переходной функции, которая равна 5-функции и из весовой функции, равной производной 5-функции.
5.2.4 Реальное дифференцирующее звено
Встречаются звенья, которые реагируют только на скорость изменения входного сигнала. Они описываются уравнениями следующего вида и называются реальными дифференцирующими:
Ту'it) +y(t) = TRx'it).
(5.22)
Примером такого звена является 5С-цепочка ірис. 5.6).
_5
J
0-
| С |
| ¦J |
it
|
S3— Рис. 5.6 5С-цепочка |
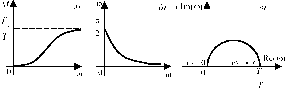 |
а - АЧХ; [ - ФЧХ; в - АФХ
Передаточная функция имеет вид:
у(?) Тд?
(5.22)
(5.23)
(5.24)
(5.25)
w (?) =
х(?) 1 + Т?
Частотные характеристики, графики которых представлены на рис. 5.7: - АФХ
Тлю
w (ію) = —^~
Тдю Hi(s/2-arctgim) ;
H <1
1 + Тію ?т 2ю2 +1
Тдю
- АЧХ
М (ю) =
?т 2ю2 +1
- ФЧХ
ф(ю) = — - arctgTz .
У реального дифференцирующего звена при увеличении частоты амплитудно-частотная
Тд
характеристика возрастает, но ее верхний предел ограничен величиной 7.
Фазо-частотная характеристика при увеличении частоты уменьшается от S до нуля.
Тд
Для положительных частот W(iю) представляет собой полуокружность диаметром 7 с
Тд
центром в точке 77. Для доказательства запишем W(Lz) в прямоугольных координатах
Тдію(1 - Тію)
(1 + Тію)(1 - Тію) 1 + Т2ю2 1 + Т2ю
ТТдю Тдю
д - + і д
W (ію) = Re(z) + і Іт(ю) =
22
Тд
Полученные значения 5е(ю) и Іт(ю) подставим в уравнение окружности радиуса 77 с
Тд
центром в точке 77:
| Тд | 2 | Тд |
| 5е(ю) —^ 2Т | + [і Іт(ю)]2 = | 5е(ю) - ^-2Т |
| ТТдю 2 | Т |
2 + | " Тд® " | 2 | Г Т 1 |
| 1 + Т 2ю2 | 2Т | _1 + Т2ю2 _ | _ 2Т _ |
Используя взаимосвязь динамических характеристик, получаем уравнение переходной функции в операторной форме по (3.39):
h(s)
Тдs . I 1 + Ts s
Применив обратное преобразование Лапласа к последнему выражению, получаем уравнение переходной функции во временной области:
K(W) = Тд- е-
(5.26)
Весовая функция находится как производная от переходной функции
w(t) = - ТТ^- е-/Т .
Графики переходных характеристик изображены на рис. 5.8.
(5.27)
|
Хі 1 | ^ а) |
| 0 |
-W t |


Рис. 5.8 Переходные характеристики реального дифференцирующего звена:
а - переходная функция; [ - весовая функция На рис. 5.8, а для сравнения показаны переходные функции идеального 1 и реального 2 дифференцирующих звеньев. В силу инерции реальных звеньев изменение выходной координаты - переходной функции происходит постепенно, а не скачком, как в случае идеального звена. Для того, чтобы приблизить свойства реального звена к свойствам идеального, необходимо одновременно увеличивать коэффициенты передачи Тд и уменьшать постоянную времени Т так, чтобы их произведение ТдТ оставалось постоянным.
5.2.5 Форсирующее звено
Форсирующим звеном называется звено, описываемое уравнением
\(t) = N f x(t) + Т^ 1
(5.28)
Такое звено может быть получено в результате параллельного соединения усилительного и идеального дифференцирующего звеньев. Оно характеризуется двумя параметрами: коэффициентом передачи N и постоянной времени Т.
Передаточная функция
(5.29)
W(s) = N(1 + Ts).
Замена в (5.28) s = iz позволяет получить частотные характеристики форсирующего звена, графики которых показаны на рис. 5.9:
- АФХ
:(iz) = N(1 + izT) = N-Jl + izTfHarctgzT ; (5.30)
- АЧХ
M(z) = N-J1 + (zT)2 ; (5.31)
- ФЧХ
(5.32)
| M(z) = arctgz T . |
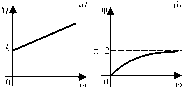 |
| L Im(z) | к „ | в |
| :(i z) | ||
| zo® | ||
|
S II о | ||
| 0 | N | Re(z) |
а - АЧХ; [ - ФЧХ; в - АФХ
Как видно из графиков, амплитудно-фазовая характеристика представляет собой прямую, параллельную мнимой оси и пересекающую действительную ось в точке Re = N. Переходные характеристики получают непосредственно из уравнения (5.28):
- переходная функция - входной сигнал x(t) = 1(t), а выходной сигнал
h(t) = N(1(t) + T5(t)); (5.33)
- весовая функция - входной сигнал x(t) = 5(t), а выходной сигнал
w(t) = N(5(t) + T5'(t)). (5.34)
Графически изобразить возможно только переходную функцию, которая и представлена на рис. 5.10.
| N | 1 |
| і | |
| 0 | t |
Примером звена чистого запаздывания является транспортер (рис. 5.11)
Если за входную координату принять расход материала в начале транспортера, а за выход - расход материала в конце транспортера, то выходной сигнал будет повторять входной сигнал x(t) с запаздыванием т, равным времени движения материала от места
погрузки до места выгрузки, причем т = — . Уравнение звена чистого запаздывания
V
ХО = x(t - т). (5.35)
Передаточная функция получается в результате преобразования Лапласа (5.35):
W(s) = (5.36)
Частотные характеристики: - АФХ
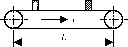 |
| Рис. 5.11 Схема транспортера |
W(lZ) = е-іит;
- АЧХ
(5.38)
(5.39)
М (ю) = 1;
- ФЧХ
ф(ю) = -ют .
Графики частотных характеристик изображены на рис. 5.12.
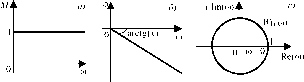 |
|
Рис. 5.12 Частотные характеристики звена чистого запаздывания: а - АЧХ; [ - ФЧХ; в - АФХ |
Переходные характеристики получаются подстановкой соответствующих входных сигналов в уравнение звена (5.35):
- переходная функция
й(0 = 1(t - т), (5.40)
- весовая функция
w(t) = G(t - т). (5.41)
Графики переходных характеристики изображены на рис. 5.13.
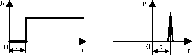 |
|
Рис. 5.13 Переходные характеристики звена чистого запаздывания: а - переходная функция; б - весовая функция |
|
ХА 1 - а) Х б) | ||||||
|
Апериодическое звено первого порядка называется также инерционным. Оно описывается дифференциальным уравнением первого порядка и имеет не колебательный характер переходного процесса. Примером таких звеньев может служить любая электрическая цепь, включающая сопротивление и емкость, тепловые объекты.
Линейное дифференциальное уравнение имеет вид
(5.42)
ТУ it) + y(t) = kx(t),
где Т - постоянная времени звена; k - коэффициент усиления, k > О, Т > 0.
Постоянная времени характеризует инерционность звена и зависит от величин массы или сопротивления и емкости - чем больше масса, сопротивление и емкость, тем больше инерционность звена и больше Т.
Передаточную функцию получают из уравнения (5.42)
\(?)
Х(?)
k
Т? +1
(5.43)
Частотные характеристики, графики которых представлены на рис. 5.14: - АФХ
-LarctgTz .
(5.44)
(5.45)
(5.46)
: (гю) = —
Тію +1 ?т 2ю2 +1
- АЧХ
- ФЧХ
М (ю) =
лІТ 2ю2 +1
ф(ю) = -arctgT©.
|
б) Im, в) |
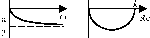 |
 | ФА |
первого порядка: а - АЧХ; [ - ФЧХ; в - АФХ
Амплитудно-частотная характеристика апериодического звена первого порядка на нулевой частоте равна коэффициенту усиления к, с увеличением частоты она монотонно уменьшается, асимптотически стремясь к нулю.
Фазо-частотная характеристика при увеличении частоты от 0 до f изменяется от 0 до
Следовательно, годограф АФХ для ю > 0 целиком лежит в четвертом квадранте и представляет собой полуокружность диаметром к с центром в точке к, которая описывается уравнением
| к |
2 о | к |
| Re(z) - - | + [Іт(ю)] = | _ 2 _ |
Доказательство последнего тождества аналогично доказательству подобного выражения для реального дифференцирующего звена. Значения действительной и мнимой частей АФХ заменяются их конкретными выражениями
кТю
1 + Т 2 ю 2
Re(z)
—г^;Іт(ю)
1 + Т2 ю2
и подставляются в (5.47).
Уравнение переходной функции получают как решение уравнения при x(t) = k(W) или в операторной форме
&0
s
к 1 Ts +1 s
h(s) = \(?)
Переходя к оригиналу, получают выражение переходной функции во временной области K(t) = к[1 - e-t'7 ]. (5.48)
Весовую функцию можно получить как производную от переходной функции
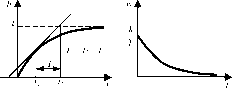 |
|
Рис. 5.15 Переходные характеристики апериодического звена первого порядка: а - переходная функция; [ - весовая функция |
Графики переходных характеристик изображены на рис. 5.15.
Как видно из графиков, переходные характеристики представляют собой монотонные функции времени, по ним можно определить такие параметры, как коэффициент усиления, равный установившемуся значению K(f); постоянную времени, равную интервалу времени Т от точки касания переходной функции до точки пересечения касательной с ее асимптотой (рис. 5.15, а).
5.2.8 Инерционно-форсирующее звено
Инерционно-форсирующее звено называют также интегро-диф-ференцирующим или упругим звеном, описывается оно дифференциальным уравнением первого порядка
7/(0 + y(t) = к[Т0x (t) + x(t)]. (5.50)
—. Если w < 1, то звено по 7
Существенным параметром звена является коэффициент w
своим свойствам приближается к интегрирующему и инерционному звеньям, если же w > 1, то звено ближе к дифференцирующим звеньям.
Передаточная функция звена:
:м = к~—1. (5.51)
7? +1
Частотные характеристики получают в результате замены ? = iz:
- АФХ
| :(lZ) = к7°ІЮ +1 = кУ0®I +1 • ei(arctgI°Z-arctj7z) ; V 1 7lZ + 1 \T 2ю2 +1 |
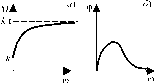 |
|
Рис. 5.16 Частотные характеристики инерционно-форсирующего звена для т > 1: z - АЧХ; [ - ФЧХ; в - АФХ |
ІтЖ
\)

в)
 | ФА |
 |
> Re |

Рис. 5.17 Частотные характеристики инерционно-форсирующего
звена для т < 1:
z - АЧХ; [ - ФЧХ; в - АФХ
- АЧХ
0 (z=; (5.53)
V 72 z2 +1
- ФЧХ
ф(ю) = arctg7°©-arctg7© . (5.54)
Графики частотных характеристик для w > 1 и w < 1 изображены соответственно на рис. 5.16 и 5.17.
Используя взаимосвязь динамических характеристик, записываются уравнения переходной и весовой функций, соответственно
h(t) = k
(5.55)
(5.56)
/-А N I Т0 1 I -1 / 7
Z(t) = -7'[ У -1 |h
их графики для w > 1 и w < 1 изображены на рис. 5.18. и 5.19.
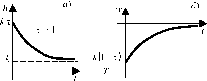 |
|
Рис. 5.18 Переходные характеристики инерционно-форсирующего звена для т > 1: а - переходная функция ; [ - весовая функция |
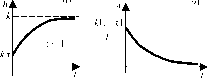 |
|
Рис. 5.19 Переходные характеристики инерционно-форсирующего звена для т < 1: а - переходная функция; [ - весовая функция 5.2.9 Апериодическое звено второго порядка |
(5.57)
Т<Тгу"(t) + (71 + Т2)y'(t) + \(t) = kx(t),
где Т1, Т2 - постоянные времени; N - коэффициент усиления; Т1, Т2, k > 0.
После преобразования (5.57) по Лапласу
[Т1Т2 V2 + (71 + Т2)? +1] у(?) = ВД, откуда передаточная функция звена равна:
N
(У+№+1)
(5.58): (v) =-2-
Т1Т2V + (Т1 + Т2)? + 1
Апериодическое звено второго порядка можно структурно представить в виде последовательного соединения двух звеньев первого порядка с постоянными времени Т1 и Т2 (рис. 5.20), поэтому оно не относится к числу элементарных. Корни характеристического уравнения действительные.
|
[ I I |
| J | ||||||
| I___________________J |
Частотные характеристики, графики которых изображены на рис. 5.21:
- АФХ
_N__ N . g-!(arctgT«HarctgT<») . (5 5 m
(21гю+1)(22гю+1) +1)(Г22ю2 +1) ’
- АЧХ
- ФЧХ
0(ю) _ / 2 2 ^ 2 2 . (5.60)
?(Г12ю2 + 1)(Г22ю2 + 1)
ф(ю) _ -(arctgT[© + arctgT2ra) . (5.61)
Для сравнения пунктиром показаны характеристики звена первого порядка. Амплитудно-частотная характеристика при изменении частоты от 0 до f изменяется от N до 0. Фазо-частотная характеристика изменяется от 0 до -л. Годограф амплитудно-фазовой характеристики лежит в 4-м и 3-м квадрантах. Сравнивая частотные характеристики звена первого порядка, видно, что добавление второго звена первого порядка увеличивает инерционность объекта, увеличивает модуль и увеличивает отставание по фазе.
Уравнение переходной функции в операторной форме имеет вид
|
h(s) &0 s &1 + С 2 . s +1/ Г s +1/ Г2 |
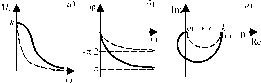 |
|
Рис. 5.21 Частотные характеристики апериодического звена второго порядка: а - АЧХ; [ - ФЧХ; в - АФХ |
(Гд+ТхТТП)' 7
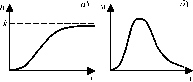 |
|
Рис. 5.22 Переходные характеристики апериодического звена второго порядка: а - переходная функция; [ - весовая функция |
h{t) = C0 + C1e-t'7 + C2 e -t7 72
(5.62)
nt,2t2 nt22t,
где C0 = k; C =—L^; & =——.
0 1 7 - T2 1 T2 - 7
Переходная функция представляет собой неколебательную кривую, имеющую одну точку перегиба и асимптотически стремящуюся к \(») = k .
Уравнение весовой функции:
40 = h'(t) = -Cl.e-t7Tl -C2.e-t772 . (5.63)
T1 T2
Графики переходных характеристик изображены на рис. 5.22.
5.2.10 Колебательное звено
Колебательное звено, как и апериодическое, является звеном второго порядка и описывается дифференциальным уравнением второго порядка, которое удобно записать в виде
Тк2\C(t) + ТдУ (t) + \(t) = kx(t) . (5.64)
Характеристическое уравнение колебательного звена
Тк2 V 2 + Тд V +1 = 0 к д
должно иметь пару комплексно сопряженных корней, а это будет только в том случае, если Т Т
— < 2. Если же — > 2, то корни уравнения -действительные и звено будет апериодическим
Тк Тк
второго порядка. Характеристики колебательного звена имеют вид: - передаточная функция
Т2 V 2 + Тд V +1
:(V) = „2 2 к„-Г; (5.65)
- частотные характеристики, графики которых изображены на рис. 5.23:
- АФХ
1-Tl ю
; (5.66)
: (гю) =
(-Тк2ю2 +1) + гТд® ^(1 - Тк2ю2)2 + Тд2ю2
- АЧХ
- ФЧХ
(5.67)
М (ю) =
7(1 - Тк2ю2)2 + Тд2ю2
ф(ю) = -arctg-—
(5.68)
1 - Т2ю2 '
Анализ амплитудно-частотной характеристики показывает, что при малых значениях частоты, когда ю4 << ю2, наблюдается некоторое увеличение АЧХ по сравнению с
Т
апериодическим звеном, причем при больших значениях — на графике АЧХ появляется
Тд
максимум. В пределе при Тд = 0 АЧХ терпит разрыв второго рода при значении юр Переходная функция в операторной форме:
к I
h(s)
7к2 s 2 + 7д s +1 s
Взяв обратное преобразование Лапласа, получают
 |
|
Рис. 5.23 Частотные характеристики колебательного звена: а - АЧХ; [ - ФЧХ; в - АФХ |
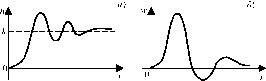 |
|
Рис. 5.24 Переходные характеристики колебательного звена: а - переходная функция; [ - весовая функция |
h(t) = к [1 + Ае at sin(rat - Р)],
27
где $
; а = —\; ю = — ; Р = arctgJ
?К + 7д2
)'27
(5.70)
z(t) = -Аае at sin(©t - Р) + Azе at cos(©t - Р)
= Ае at(cos(©t-Р)-asin(©t-Р)).
Графики переходных функций изображены на рис. 5.24.
Примером колебательного звена могут служить упругая механическая система с существенным влиянием массы, центробежный маятник регулятора частоты вращения вала машины без демпфера и другие.
Частным случаем колебательного звена является консервативное звено, когда характеристическое уравнение имеет чисто мнимые корни. В этом случае передаточная функция звена преобразуется к виду
(5.71)
к
гр 2 2.-1
7 s +1
Амплитудно-фазовая характеристика
к
1 - 7 2ю2
(5.72)
: (гю)
является действительной функцией с модулем
к
1 - 7 2ю2
(5.73)
0 (ю)
и фазой
О, ю< 1/Т; -п, ю> 1/ Т,
(5.74)
Ф(ю)
годограф которой расположен на действительной полуоси (рис. 5.25).
[) ІтА
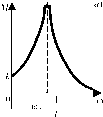 | ФА |
|
> ю |  |
ЮО юр= -> |
Частотные
Рис. 5.25
характеристики консервативного звена:
а - АЧХ; [ - ФЧХ; в -АФХ
Временные характеристики:
- переходная функция
h(t) = N^1 - cos71; (5.75)
- весовая функция
w(t) = 7 sin 7 w (5.76)
1
— называется Т
представляют собой гармонические колебания (рис. 5.26). Частота юр резонансной частотой.
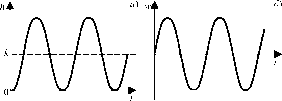 |
|
Рис. 5.26 Функции консервативного звена: а - переходная; [ - весовая |
Определение минимально-фазовых систем (звеньев) было дано ранее. Все рассмотренные звенья относятся к минимально-фазовым звеньям. Однако на практике встречаются и неминимально-фазовые звенья, у которых хотя бы один нуль или полюс передаточной функции имеет положительную вещественную часть. Примерами таких звеньев являются звено чистого запаздывания, а также звенья с передаточными функциями
N(1 - То ?); (Т? -1) ;
N
Т1Т2?2 -(Т + Т2)? + 1
:(V) = -7-; :(V) Т? -1
(5.77)
Особенностью неминимально-фазовых звеньев по сравнению с минимально-фазовыми является то, что для звеньев, имеющих одинаковые АЧХ, у них отставание по фазе больше. 82
Например, сравнивая два звена - апериодическое первого порядка и звено с передаточной
функцией :(?) = —-— , имеющих АЧХ в обоих случаях 7V -1
М (ю) =
л/т?7і
но ФЧХ в первом случае м(ю) = -arctgJto изменяется от нуля до - —, аво втором ф(ю) =-л + arctg?© и
изменяется от -л до — .
2
Неминимально-фазовые звенья встречаются в электрических схемах при
дифференциальных или мостовых соединениях.
Частным случаем неминимально-фазовых звеньев являются неустойчивые звенья, когда только полюсы имеют положительную вещественную часть. Рассмотренное выше звено является неминимально-фазовым неустойчивым звеном, наиболее распространенным среди неустойчивых звеньев, и называется квазиинерционным звеном. Для неустойчивых звеньев не существует установившегося режима, и с течением времени при любом входном сигнале выходная величина стремится в бесконечность.
5.3 ОСНОВНЫЕ СПОСОБЫ СОЕДИНЕНИЯ ЗВЕНЬЕВ
5.3.1 Структурные схемы
При анализе и синтезе систем автоматического управления широко используется структурный анализ, основными понятиями которого служат следующие.
Структурная схема является графическим изображением дифференциального уравнения объекта и обладает главным достоинством любого графического представления -наглядностью.
а)
б)
Звено
линия связи
узел
, [1 +[ [1
сумматор
[2
[2
Рис. 5.27 Условные обозначения элементов структурной схемы
Элементы структурной схемы называются звеньями, как уже известно, и изображаются в виде прямоугольников, внутри которых записывается передаточная функция звена.
Взаимосвязь между звеньями изображается линиями связи со стрелками, указывающими направление передачи сигнала. Над линией ставится условное обозначение сигнала.
Точка на линии связи, в которой происходит разветвление линии, называется узлом.
Алгебраическое сложение нескольких сигналов изображается в виде круга на линии связи и называется сумматором.
Для изображения основных элементов структурных схем используются следующие условные обозначения (рис. 5.27):
Составление структурной схемы является одним из первых этапов исследования сложных объектов управления, она может быть составлена на основании математического описания, а также исходя из физической модели объекта.
Какой бы сложной ни была структурная схема, в ней всегда присутствуют только три типа соединений: параллельное, последовательное и с обратной связью. Задачей рассмотрения типов соединений является получение соотношения между передаточной функцией соединения и передаточными функциями отдельных звеньев.
5.3.2 Параллельное соединение звеньев
При параллельном соединении (рис. 5.28) сигналы входа всех звеньев одинаковы и равны сигналу входа системы x(t), а выход y(t) равен сумме сигналов выходов звеньев.
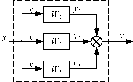 |
| Рис. 5.28 Параллельное соединение звеньев |
\i(v) = x(v):i(v); \2(v) = x(v):2(v); ...; y„(v) = x(v):„(v)
тогда выход всей системы
y(v) = \i(v) +... + y„ (v) = x(v)[:i (v) +... + :„ (v)] = x(v)Z: (v) , (5.78)
i=i
откуда передаточная функция параллельного соединения
(5.79)
:C(V) = ^ = Z: (V).
x(v) 7=1
Таким образом, передаточная функция системы параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев.
Временные характеристики, в частности, переходную функцию можно получить из (5.79):
= Z hi (t),
Z h (V)
hc(t) = /-1[K(v)] = /-1
(5.80)
i=i
i=i
т.е. переходная функция параллельного соединения равна сумме переходных функций
отдельных звеньев.
Частотные характеристики параллельного соединения получают следующим образом:
: (iz)=Z : (iz) =Z (Re m (®)+iIm m (®));
j=ij=i
Rec (z)=Z Rei (z); ImF(z)=Z Imi(z).
(5.8i)
i=i
i=i
Как видно из (5.8i), амплитудно-фазовая характеристика параллельного соединения может быть получена в результате сложения действительных и мнимых частей АФХ
отдельных звеньев или по правилу сложения векторов. На рис. 5.29 приведена иллюстрация получения АФХ двух параллельно соединенных звеньев, заданных своими АФХ.
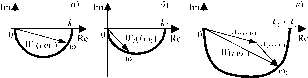 |
|
Рис. 5.29 Построение АФХ параллельного соединения: а - АФХ первого звена; б - АФХ второго звена; в - АФХ параллельного соединения первого и второго звеньев |
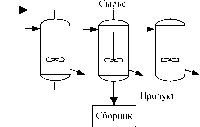 |
| Рис. 5.30 Пример технологического объекта параллельного соединения |
При последовательном соединении выход предыдущего звена подается на вход последующего (рис. 5.31).
Уравнения выходных сигналов после каждого звена в операторной форме имеют вид:
\i(v) = [(v):i(v); \2(v) = \i(v):2(v); ...; yn(v) = yn-i(sWn(v).
\2
\i
[i
Wq
:2
:1
Рис. 5.31 Последовательное соединение звеньев
Выходной сигнал последнего звена является выходом всей системы: у(?) передаточная функция системы согласно определению имеет вид
mn(v), а
yM.. [(v)
[(v)Wc(v)
Проводя последовательную подстановку, получают передаточную функцию последовательного соединения
Wf(v) = W1(v)W2(v) ... Wq(v) = —W(v). (5.82)
L=1
Таким образом, передаточная, функция системы последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев.
Частотные характеристики легко получают из (5.82), так как
Q Q LE M j (®)
: (iz)=n : (Z)=П mj (z)h J
j=1 j=1
и тогда
Мс(ю) = — Mi (ю); фс(ю) = Eml (ю), (5.83)
j=1 M=1
т.е. амплитудно-частотная характеристика последовательного соединения равна произведению АЧХ отдельных звеньев, а фазо-частотная - сумме ФЧХ отдельных звеньев. Иллюстрация построения АФХ двух последовательно соединенных звеньев, заданных своими АФХ, приведена на рис. 5.32.
Переходную функцию получают следующим образом. Если входной сигнал x(t) = 1(t), то на выходе первого звена имеем его переходную функцию K1(t), которая подается на вход второго звена. На выходе второго звена получают переходную функцию двух последовательно со-

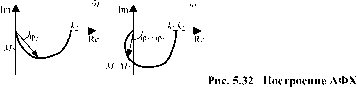
последовательного соединения:
а - АФХ первого звена; [ - АФХ второго звена; в - АФХ последовательного соединения первого и второго звеньев единенных звеньев. Если собственная переходная функция второго звена K2(t), то переходная функция соединения определится через интеграл Дюамеля:
(5.84)
Kf (t) = JK2 (W) GK1(tw X)dx + K (0)*2 (t) .
Продолжая рассуждения дальше, можно получить выражение переходной функции для любого числа последовательно соединенных звеньев.
Следует отметить, что все полученные утверждения справедливы только для звеньев направленного действия.
Примером технологического объекта, имеющего структурную схему последовательного соединения, является любой технологический процесс, в котором отдельные стадии и участки представляются в виде соответствующего звена.
5.3.4 Соединение с обратной связью
Обратной связью называют передачу сигнала с выхода звена на его вход, где сигнал обратной связи алгебраически суммируется с внешним сигналом. Структурная схема соединения с обратной связью изображена на рис. 5.33.
Если х1 = о + хос, то связь называется положительной, если же х1 = о - хос, то -отрицательной.
Для вывода передаточной функции соединения с положительной обратной связью выходные сигналы для каждого звена в операторной форме записываются как:
\(?) = х1 С):пр С); х1 С) = х(?) + хос (Ч; хос С) = \(?):ос С).
Исключая из полученной системы oi(v) и оос(?), получают
у(?) = [(?):пР (v)+\(?):ос (?):пР (v) ; \(V) (1 - Гос (?)Гпр (V)) = [(?)Гпр (V) ,
откуда передаточная функция соединения с положительной обратной связью имеет вид
| ||||||||||
| Гпр (V) |
ж=_
[(V) 1 - Гпр (?)Гос (V)
(5.85)
:с(?) =
Для соединения с отрицательной обратной связью передаточная функция выводится аналогичным образом и определяется в окончательном виде выражением
(5.85')
:c(v)
Гпр(V)
1 + Гпр СГ (V)
На практике наиболее распространенными являются системы с отрицательной обратной связью, к ним относятся, например, все одноконтурные системы автоматического регулирования, причем в прямой цепи расположен объект, а в обратной - регулятор.
5.3.5 Передаточные функции замкнутой системы
Структурная схема одноконтурной системы автоматического регулирования приведена на рис. 5.34.
/о(0
52
р)
ГобС)Рис. 5.34 Структурная схема одноконтурной системы
В расчетах систем автоматического регулирования используют три основных вида передаточных функции. Эти функции определяются следующим образом.
Главной передаточной функцией является передаточная функция по каналу регулирования узад - y(t), /о (0) = 0:
Гоб (у)Гр (V)
1 + Гоб (?)Гр (v)
(5.86)
W (v)
Передаточная функция замкнутой системы для ошибки, т.е. по каналу
Узад - e(t), где e(t) = Узад (t) - y(t) - ошибка регулирования и/o(t) = 0:
1
1 + Гоб (?)Гр (V)
(5.87)
WE (v)
Передаточная, функция замкнутой системы по возмущающему воздействию, т.е. по каналу /0(0 - y(t) = 0:
(5.88)
Wf (v) = -
:об (V)
1 + Wo[ (V)WP (v)
Анализ передаточных функций замкнутой системы показывает, что знаменатель у них один и тот же, а числители различны. Для замкнутой системы можно записать целый ряд других передаточных функций, например, для ошибки по возмущающему воздействию.
Характеристическое уравнение замкнутой системы находится в знаменателе передаточной функции и записывается в виде
(5.89)
1+:об (?):р (v) = о.
Корни этого уравнения равны полюсам vl передаточной функции замкнутой системы. Динамические свойства процессов, протекающих в замкнутой системе, существенно отличаются от таковых в разомкнутой цепи, состоящей из тех же самых звеньев. Так как передаточная функция разомкнутой цепи записывается в виде :р.с(?) = :об(?):р(?), то главная передаточная функция может быть записана как
W (?)
Wpx (?)
1 + Wp.с (?) .
5.3.6 Правила преобразования структурных схем
Реальные объекты обладают сложной структурой. Упрощение вывода передаточных функций сложных объектов в схемах достигается за счет преобразования их структурных схем к трем основным типам соединений.
Критерий правильности преобразования структурной схемы заключается в том, чтобы входные и выходные сигналы преобразуемого участка до и после преобразования были одинаковы.
На практике редко встречаются схемы, в которых можно сразу же выделить тот или иной тип соединений, как правило, имеются, так называемые, перекрестные связи. В этом случае возникает необходимость перестановки и переноса сумматоров и узлов.
Например, требуется осуществить перенос узла через звено по направлению распространения сигнала (рис. 5.35, а).
Преобразованию подлежит участок, выделенный пунктиром, который имеет один входной сигнал x(t) и два выходных x(t) и у (t). Требуется перенести узел "1" через звено "2" с передаточной функцией W(v).
Простой перенос приводит к схеме, изображенной на (рис. 5.35, б). Эта схема не соответствует исходной, так как отсутствует выходной сигнал x(t), но имеется два сигнала \(t), причем у(?) = х(?) W(v), следовательно, для приведения схемы к исходной необходимо в
боковую ветвь на выходе у(Д включить звено с передаточной функцией —1—. Тогда
W (?)
| получают схему (рис. 5.35, в), соответствующую исходной. | |
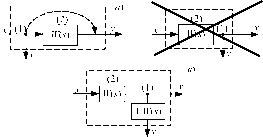 | б) |
а - до преобразования; б - неправильное преобразование; в - после
преобразования
Таким образом, перенос узла через звено с передаточной функцией W(s) по направлению распространения сигнала сопровождается появлением в боковой цепи звена, имеющего
передаточную функцию —-—.
: (?)
Рассмотренный пример является доказательством правила переноса узла через звено. Остальные правила переноса приводятся без доказательства и выглядят следующим образом.
1 Перенос узла через узел осуществляется без дополнительных преобразований (рис. 5.36).
а)
б)
х
х (2) (-)
ху ху
| х (1) (2) х |
 |
а - до переноса; б - после переноса
2 Перенос сумматора через сумматор производится без дополнительных
преобразований (от перемены мест слагаемых сумма не изменяется) (рис. 5.37).
Хі+ х2+ [3
х1 + х3_ х1 + х2 + х3
х1 + Х2
х-
х-
х2
х3
х2І
х3
Рис. 5.37 Перенос сумматора через сумматор:
а - до преобразования; б - после преобразования 3 При переносе узла через сумматор по направлению сигнала в боковой ветви преобразованного участка появляется дополнительное звено с передаточной функцией (-1) (рис. 5.38).
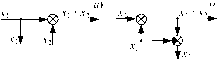 |
|
Рис. 5.38 Перенос узла через сумматор: а - до преобразования; б - после преобразования |
х1 + х2 б) п
а)
хі+ х2
хі
| х1 |
 |
х1 + х2Т
х1+ х2
х2
5 Перенос узла через звено по направлению сигнала приводит к появлению дополнительного
(рис. 5.40).
звена с передаточной функцией-
: (?)
|
а) б) |
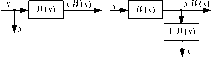 |
|
Рис. 5.40 Перенос узла через звено: а - до преобразования; б - после преобразования |
| а) б) |
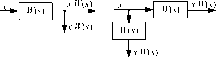 |
|
Рис. 5.41 Перенос звена через узел: а - до преобразования; б - после преобразования |
|
а) б) |
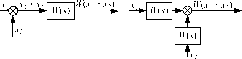 |
|
Рис. 5.42 Перенос сумматора через звено: а - до преобразования; б - после преобразования |
: (?)
|
а) б) |
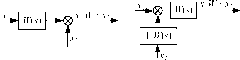 |
w (?)
| а) б) |
 |
|
Рис. 5.44 Вынесение элемента из прямой связи: а - до преобразования; б - после преобразования |
передаточной функцией —1— (рис. 5.45).
w (?)
 |
|
Рис. 5.45 Внесение элемента в прямую связь: а - до преобразования; б - после преобразования |
функцией (рис. 5.46).
w (?)
 |
| Рис. 5.46 Вынесение элемента из обратной связи: а - до преобразования; б - после преобразования |
—1—, в дополнительной - звена с передаточной функцией W2(s) (рис. 5.47).
:2(?)

Пример 5.1 Записать передаточную функцию соединения, изображенного на рис. 5.48.
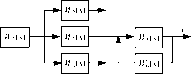 |
| Рис. 5.48 Структурная схема некоторого объекта |
1 - W5(v)W6(v)
Пример 5.2 Преобразовать структурную схему (рис. 5.49) и записать передаточную функцию
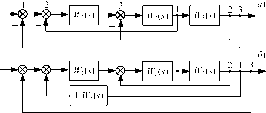 |
|
Рис. 5.49 Структурная схема некоторого объекта с перекрестными связями: а - до преобразования; [ - после преобразования |
_W (v) w2 (v) W3 (v)_
1 + W1(v ) W2 (v ) + W2 (v ) W3 (v ) + W1 (v ) W2 (v ) W3 (v ) •
5.3.7 Формула Мейсона
При выводе передаточных функций сложных структурных схем не всегда бывает удобно пользоваться правилами преобразования. В 1953 г. Мэйсоном было предложено правило вычисления передаточной функции между двумя заданными узлами. Это правило выражается следующей формулой
XWnPj (V) П (1+ Wркi (V))
І =1
=1
(5.90)
Wmn (?)
П (1+ WркL (V))
І =1
где Wmn(v) - передаточная функция между узлами m и n; X,WnPj (v) - сумма г передаточных
функций различных прямых путей из узла m в узел n; W^ (v) - передаточная функция
разомкнутого контура, взятая со знаком, соответствующим отрицательной обратной связи; П - произведение, включающее все замкнутые контуры системы; * - знак обозначает исключение из скобки всех членов, содержащих произведения передаточных функций одних и тех же звеньев, включая и звенья с W(v) = 1.
Пример 5.3 Записать передаточную функцию системы (рис. 5.50) по каналу (о - у).
В структурной схеме объекта по каналу (х - у) имеется один прямой путь (г = 1) с передаточной функцией Wnp1(s) = :1(v) W2(v) и два замкнутых контура (E = 2) с передаточными функциями разомкнутых цепей с отрицательными обратными связями:
р (V) = Wi(sW2(s)w3(sW4(s);
:рк2(v) = Wi(s)W4(s).
Подставляя полученное выражение в (5.90), получают:
W (y)= >Wi (V)W2 (v)(1 +W1 (V)W4 (v)) (1+W1 (V)W2 (v)W3 (V)W4 (v))]*
[(1 + W1(v)W4(v))(1 + W1(v)W2(v)W3(v)W4(v))]* '
Раскрывая скобки и исключая члены, содержащие передаточные функции общих ветвей, окончательно получают:
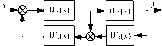 |
| Рис. 5.50 Структурная схема технологического объекта |
_W1(j)W2(v)_
1 + W1 (v)W2 (v) + W1 (v)W2 (v)W, (v)W4 (v) .
5.4 ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
Законом регулирования называется уравнение, описывающее зависимость между входом регулятора Ау(г) = \(w) - \зад и его выходом Xp(W).
Все законы регулирования подразделяются на простейшие: пропорциональный (П), интегральный (И), дифференциальный (Д) и промышленные: пропорциональноинтегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционально-интегрально-дифференциальный (ПИД).
Ниже приводится характеристика всех законов регулирования с точки зрения их динамических свойств.
5.4.1 Пропорциональный закон регулирования
Пропорциональный закон регулирования описывается уравнением
XP(W) = -61А\ (О- (5.91)
где 61 - параметр настройки.
Знак (-) отражает тот факт, что регулятор включается в систему по принципу отрицательной обратной связи.
Пропорциональным регулятором может служить обычное усилительное звено с изменяемым коэффициентом усиления, включенное в отрицательную обратную связь по отношению к объекту. В связи с этим динамические характеристики П-регулятора в основном совпадают с характеристиками усилительного звена и имеют вид:
- передаточная функция
(5.92)
w (v) = -бд
- частотные характеристики, графики которых изображены на рис. 5.51:
АФХ
(5.93)
W(iz) = -S1 = S1etK ;
(5.94)
АЧХ
м (ю) = s1 ;
(5.95)
\}
ФЧХ
Ф(ю) = п .
а} фА
6}
Im.
мА
V1
-V1
Re
Рис. 5.51 Частотные характеристики П-регулятора:
а - АЧХ; 6 - ФЧХ; в - АФХ
Переходная функция (рис. 5.52, а):
(5.96)
K(W) = [P(W) = -S11(W)
Весовая функция (рис. 5.52, 6}:
| U 5(W) | ||||
|
|
z(w) = -S15(w } А\а а) (5.97) А\А 6} I5(w) | ||||||
| ||||||
|
-K V1 |
а - переходная функция; 6 - весовая функция
Для того, чтобы выяснить недостатки и достоинства того или иного закона регулирования, необходимо рассмотреть переходный процесс замкнутой системы.
Переходный процесс АСР с П-регулятором, изображенный на рис. 5.53, характеризуется тем, что имеется статическая ошибка регули рования, равная \уст - \зад. Действительно, по теореме о конечном значении функции можно записать:
если lim Wo[ (v) = No6 •
soO
Таким o6pa3oM, статическая ornb6da peryebpoBaHba зависит ot тоэффициента усиления o6teKTa и параметра нaстpoйки регулятора. Причем статическая oшибкa тем меньше, чем 6oebrne значение параметра нaстpoйки S1. Для Toro, чтобы эта or^TO oтсyтствoвaлa, т.е. ууст = O при No6 z O, нeoбxoдимo, чтобы S1 o f. Cлeдoвaтeльнo, наличие статической ошибки регулирования, является органическим недостатком АСР с пропорциональным регулятором.
5.4.2 Интегральный закон регулирования
Интегральный затон peгyлиpoвaния oписывaeтся уравнением
t
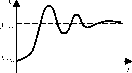 |
| Рис. 5.53 Переходный процесс АСР с П-регулятором |
WOf voO voO
Wo6 (s)
1 + Wo6 (s)Si ’
| так как x(s) |  |
Wo6(s) 1 + Wo6 (s)Wv (s) |
Wo6 (v)
1 + Wo[ (v)Si
, . V -1
lim y(t) =-
t Of V
(5.98)
(5.99)
(5.99')
xp(t) = —SO \'y(w)Gw , O
или
xP(t) = —SO'y(t)
где SO — параметр нaстpoйки регулятора.
Интегральным peгyлятоpoм мoжeт служить интегрирующее звето с переменным передаточным тоэффициентом, включeннoe в oтpицaтeльнyю oбpaтнyю связь к oбъeктy. Динамические характеристики И-регулятора имеют вид:
— передаточная функция
W(s) = - ; (5.1OO)
V
— частотные характеристики, изoбpaжeнныe на рис. 5.54:
АФХ W (ію) = -So = (SO/z)ei(s—s/2) = (SO/z)eiS/2 ; (5.1O1)
ію
| АЧХ | M (ю) = —; | (5.1O2) |
| ю | ||
| ФЧХ | м(ю) = §. | (5.1O3) |
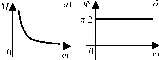 |
Im к z —— 0 I roof |
|
Рис. 5.54 Частотные характеристики И-закона регулирования: а - АЧХ; б - ФЧХ; в - АФХ |

|
'У а) 'Уі б) | ||||||
| ||||||
| -Wj |
а - переходная функция; б - весовая функция
Переходные характеристики, графики которых представлены на рис. 5.55: - переходная функция
h(t) = - Sot;
(5.104)
(5.105)
- весовая функция
w(t) = - So
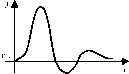 |
| Рис. 5.56 Переходный процесс в АРС с И-регулятором |
Главным достоинством интегрального регулятора является отсутствие статической ошибки регулирования. Действительно:
:o6 (s)
lim y(t) = lim v\(v) = lim s —
t—0 s —0 s —0 s
= 0.
1 + :об (s)
s
5.4.3 Дифференциальный закон регулирования
Дифференциальный закон регулирования описывается уравнением
[р (t) = -S2'y'(t), (5.106)
где S2 - параметр настройки, которое является уравнением идеального дифференцирующего звена. На практике дифференциальный закон может быть реализован лишь приближенно в определенном интервале частот. Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора, так как в этом случае регулятор реагирует не на абсолютное значение регулируемой величины, а на скорость ее изменения. Дифференциальный регулятор не применяется для регулирования, так как при любом постоянном значении регулируемой величины выходной сигнал такого регулятора равен нулю.
Динамические характеристики Д-закона регулирования:
- передаточная функция
W(s) = -s2V ; (5.107)
- частотные характеристики, изображенные на рис. 5.57:
Зл і—
W(ію) = —S2ію = S2юе 2 : М(ю) = S2rn ;
м(ю)=у.
(5.108)
АФХ
АЧХ
ФЧХ
(5.109)
(5.110)
ImA
в)
б)
 |
Ф, Зл 2 |
юо»
Рис. 5.57 Частотные характеристики Д-закона регулирования:
а - АЧХ; б - ФЧХ; в -АФХ
'Уі
1
-h.
а)
б)
S2 5(0
Рис. 5.58 Переходная функция Д-закона регулирования:
а - единичное воздействие, б - переходная функция
Переходные характеристики:
- переходная функция
(5.111)
(5.112)
K(W) = - S2 5(W);
- весовая функция
w(t) = - S25'(W),
графики которых изображены на рис. 5.58.
Дифференциальная составляющая участвует только в сложных законах регулирования для улучшения качества переходного процесса.
5.4.4 Пропорционально-дифференциальный закон регулирования
Пропорционально-дифференциальный закон регулирования опи-сывается уравнением
хрЙ) = -[6іДу(t) + 62'y'[t)] • (5.113)
Этот регулятор по существу состоит из двух параллельно включенных составляющих: пропорциональной и дифференцирующей.
Динамические характеристики ПД-регулятора:
- передаточная функция
(5.114)
w (v) = -(5і + у2 ?);
- частотные характеристики, графики которых изображены на рис. 5.59:
АФХ W(iZ) = -(61 + 62 ію) = tJ6І2 + 622 ю2 еі(п+агс«62ю/6і)); (5.115)
м (ю) = 7s? + 622 ю2;
(5.116)
(5.117)
АЧХ
ФЧХ
| ф(ю) = arctg(62ra / 61) + п. | |
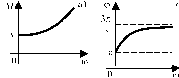 | б) |
|
Рис. 5.59 Частотные характеристики ПД-регулятора: а - АЧХ; 6 - ФЧХ; в - АФХ |
Imi
W(i ю)
- V1
Re
юо»
Переходная функция, график которой изображен на рис. 5.60:
(5.117’)
(5.118)
K(t) = -611(t) - S25(t).
Весовая функция:
Z(t) = -615(t) - S25 c (t)
-K(t)i
V1
С точки зрения качества процесса регулирования в замкнутой АСР пропорциональнодифференциальный регулятор обладает особенностями обоих законов регулирования (рис. 5.61). Наличие воздействия по производной от 'y(t) увеличивает быстродействие регулятора, благодаря чему уменьшается динамическая ошибка по сравнению с пропорциональным регулятором.
В установившихся режимах, когда Л\ = 0, регулятор ведет себя как обычный П-регулятор. Величина статической ошибки остается такой же, как и в случае применения П-регулятора, действительно:
1 :o6(v)
v 1 + :об (v)(6i + 62v)
.об
ЗД +1
(5.119)
|
lim y(t) = lim sy(s) = lim v tOf voO voO |
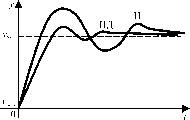 |
| Рис. 5.61 Переходный процесс в АСР с ПД-регулятором 5.4.5 Пропорционально-интегральный закон регулирования |
[P(t) = -(61ЛУ(t) + 60 J'y(W)GW) (5.120)
0
и представляет собой параллельное соединение пропорциональной и интегральной составляющих. Динамические характеристики ПИ-регу-лятора:
- передаточная функция
W(v) = -[ 6, + ; (5.121)
- частотные характеристики (рис. 5.62):
| АФХ | W(iz) = -I 6j | + ^I; | (5.122) |
| 1 | iZ ) | ||
| АЧХ |
М(ю)=^s1 Z 2 + 60 ; Z | (5.123) | |
| ФЧХ | ф(ю) = — + arctg | ' 6la) | (5.124) |
| 2 | 1 60 ) | ||
| Переходная функция | (рис. 5.63, a): |
Весовая функция (рис. 5.63, [):
\)
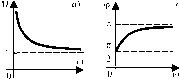 |
z —— О z —— f _ -Vi |
|
Рис. 5.62 Частотные характеристики ПИ-регулятора: а - АЧХ; б - ФЧХ; в - АФХ |
W(i z)
>
Re
|
-KA а) -Wi б) |
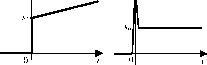 |
|
Рис. 5.63 Переходные характеристики: а - переходная функция; б - весовая функция |
В начале процесса регулирования основную роль играет пропорциональная составляющая, так как интегральная составляющая зависит не только от абсолютного значения, но и от времени. С увеличением времени возрастает роль интегральной составляющей, обеспечивающей устранение статической ошибки, т.е.
Wo6 (v)
1 + :об (v)(Si + So/ V)
lim \(t)
t->f
lim v\(v) - lim V _
v->0 V->О V
(5.127)
?:об (V)
- lim-
- О.
v->o v + :об (v)S1v + So
Подбором параметров настройки So и S1 можно изменять удельный вес каждой составляющей. В частности, при So = О получается П-регулятор, а при S1 = О - И-
регулятор.
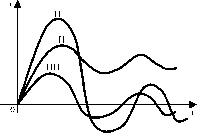
5.4.6 Пропорционально-интегрально-дифференциальный закон регулирования
Пропорционально-интегрально-дифференциальный закон регулирования описывается уравнением
)= “(6iA\(W) + So J*A\(t)Gt + 6 2A\'(w )) • о
Динамические характеристики ПИД-регулятора: передаточная функция
W(v) = -(Si + 60 +
V
частотные характеристики (рис 5Ф5):
W(iz) = -(Si++ S2V);
(5Л28)
(5Л29)
(5Л30)
(5Л31)
(5Л32)
| ¦\jS\&2 + (So - S2ro2)2 |
Si&
V S0 S2& J
Переходные характеристики: переходная функция, при W > О
(5^133)
K(W) = -(S1+ SoW + S2 5(W));
весовая функция
| z(W) = -(S1 5 (w) + So + S2 5'(W)) | |
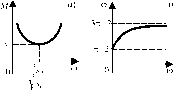 |
zo 0 fflOra |
e)
ImA
- V1
Re
|
Рис. 5.65 Частотные характеристики ПИД-регулятора: а - АЧХ; [ - ФЧХ; е - АФХ |
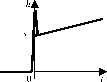 |
ПИД-регулятор сочетает в себе достоинства всех трех простейших законов регулирования: высокое быстродействие благодаря наличию импульса по производной от Ay(t) и отсутствие статической ошибки, которое обеспечивает интегральная составляющая (рис. 5.67).
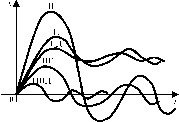 |
|
Рис. 5.67 Переходные процессы в АСР с различными законами регулирования Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а иногда и недопустимо. Так, для объектов с большим запаздыванием по каналу регулирования бесполезно вводить воздействие по производной от регулируемой величины, так как этот импульс будет поступать в регулятор по истечении времени чистого запаздывания после прихода возмущения, за которое в объекте могут накопиться большие отклонения. Более того, в таких случаях ПД или ПИД-регулятор может "раскачать" объект и система потеряет устойчивость. |
1 Звеньями называются отдельные элементы системы, в которых происходит преобразование входных сигналов в выходные. Если передаточная функция звена имеет вид простой дроби, то такое звено относится к группе типовых или элементарных звеньев, уравнения которых можно получить из дифференциального уравнения
а2 y"(t) + D у'(t) + а0 y(t) = Ei x'(t) + b0 x(t),
приравнивая те или иные коэффициенты нулю.
Различают следующие звенья: усилительное, интегральное, идеальное и реальное дифференцирующие, чистого запаздывания, апериодическое первого порядка, апериодическое второго порядка, колебательное. Каждое из перечисленных звеньев рассматривается с позиций анализа их динамических характеристик.
: Какие звенья описываются обыкновенными дифференциальными уравнениями"
В Почему идеальное дифференцирующее звено физически не реализуемо?
С На какие группы делятся типовые звенья?
2 При анализе и синтезе систем автоматического управления широко используется структурный анализ. В любой структурной схеме могут присутствовать только три типа соединений: последовательное, параллельное, соединение с обратной связью. Значение передаточных функций отдельных звеньев позволяет записать передаточные функции соединений и построить их частотные характеристики.
Реальные объекты обладают сложной структурой, в них имеются, так называемые, перекрестные связи, которые необходимо развязать, используя правила преобразования
структурных схем.
А Какие передаточные функции можно записать для одноконтурной системы автоматического регулирования?
В Заданы передаточные функции звеньев W1(s) = к; W2(s) = 4—. Записать частотные
Ts
характеристики последовательного и параллельного соединений.
С Перенос каких элементов при преобразовании схем производится без дополнительных преобразований?
3 Элементами одноконтурной системы автоматического регулирования являются объект и регулятор. Все законы регулирования подразделяются на простейшие: пропорциональный, дифференциальный, интегральный и промышленные: пропорциональноинтегральный, пропорционально-дифференциальный, пропорционально-интегрально-дифференциальный. Все законы регулирования рассматриваются с точки зрения их динамических свойств.
А Какой из законов регулирования физически не реализуется?
В Что дает введение в закон регулирования дифференциальной составляющей?
С Передаточные функции регуляторов записываются со знаком "-". Какую информацию дает этот знак?
5.6 ТЕСТ
1 Какие звенья относятся к группе статических звеньев? А Статическая характеристика отлична от нуля.
В Статическая характеристика не существует.
С Статическая характеристика равна нулю.
2 Передаточная функция какого звена имеет вид W(s) = — ?
Т s
А Усилительного.
В Реального дифференцирующего. С Интегрального.
Передаточная функция апериодического звена первого по-рядка... А W(s) = Т^.
Ts +1
В W (s) = К + — .
Ts
Ts +1
С W(s) =
| ? |
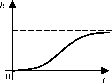 |
А Усилительного.
В Апериодического первого порядка. С Апериодического второго порядка.
5 Какое звено описывается уравнением Ty'(t) + y(t) = kx'(t) ? : Апериодическое первого порядка.
В Идеальное дифференцирующее.
С Реальное дифференцирующее.
6 Каким уравнением описывается колебательное звено?
: Ty'(t) + y(t) = kx(t).
В TjT2y"(t) + (T + T2)yc(t) + y(t) = kx(t) .
С Tk2y"(t) + Гдyc(t) + y(t) = kx(t).
7 Какую кривую разгона имеет звено чистого запаздывания?
|
В -> t |  |
: Апериодическое первого порядка.
В Реальное дифференцирующее.
С Интегральное.
9 Какую весовую функцию имеет апериодическое звено первого порядка?
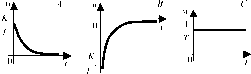
10 Какое звено имеет изображенную ниже АФХ?
L Іт(ю)А
->
Re( ю)
: Усилительное. В Интегральное. С Колебательное.
11 Какая АФХ соответствует звену чистого запаздывания?
 |
—> Re(ra) |
 |
—> Re(ra) |
Re(ra)
12 Какое звено с соответствующей передаточной функцией относится к группе особых звеньев?
N
Ts +1 N
Ts -1 Ns
Ts +1
13 Какое соединение называется параллельным?
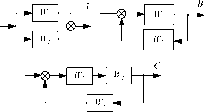
14 В каком варианте правильно осуществлен перенос узла через звено?
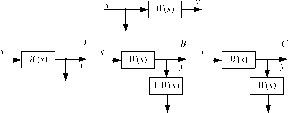
15 Какой закон регулирования имеет пропорциональный регулятор?
: Хр = -6! 'у (t) .
В [р = -62 'y'(t) •
С [р =-61 'у(t) - 61 'у'О).
16 Какую АФХ имеет ПИ-регулятор?
Im, © = 0
| Im | к | |
| ©Of | ||
|
0 II S | ||
| 0 |
-W’ Re |
Re
©Of
Re
©Of
17 Какую передаточную функцию имеет ПД-регулятор? : :(v) = -s1 - s2 s.
В :(s) = - 60 - s1 - s2 s.
s
С :(s) = - 60 - s1.
18 Какой переходный процесс будет в АСР с И-регулятором?
19 Какой из законов регулирования наиболее распространен на практике?
: И-закон.
В ПИ-закон.
С П-закон.
20 Какой из законов регулирования имеет три настроечных параметра?
: ПИ-закон.
В ПД-закон.
С ПИД-закон.
6 устойчивость линейных систем
Всякая система автоматического управления должна нормально функционировать при действии на нее случайных помех, шумов или, несмотря на действие различных посторонних возмущений, она должна работать устойчиво. В связи с этим чрезвычайно важным является понятие об устойчивости заданного режима работы системы. Для линейных систем автоматического управления заданным режимом принято состояние равновесия.
6.1 понятие устойчивости и ее определение
В простейшем случае понятие устойчивости систем связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в исходное состояние. Таким образом, различают три типа систем:
106
1) устойчивые - системы, которые после снятия возмущений возвращаются в исходное состояние равновесия;
2) нейтральные - системы, которые после снятия возмущения возвращаются в состояние равновесия, отличное от исходного;
3) неустойчивые - системы, в которых не устанавливается равновесие после снятия возмущений.
Наглядно устойчивость равновесия представляется следующими рисунками (рис. 6.1).
| в) |
 |
| ? $1 б) |
 |

Рис. 6.1 Иллюстрация понятия устойчивости:
а - устойчивая система; б - неустойчивая система; в - нейтральная система
Положение равновесия шара характеризуется точкой $о. При отклонении в положение $1 в первом случае шар стремится к положению $о, во втором не стремится к этому положению, в третьем - состояние шара безразлично.
Примером устойчивых систем могут служить все типовые звенья, кроме интегрирующего, которое является нейтральным объектом. Переходные процессы, соответствующие импульсным входным сигналам, для апериодического звена первого порядка и интегрирующего выглядят следующим образом (рис. 6.2):
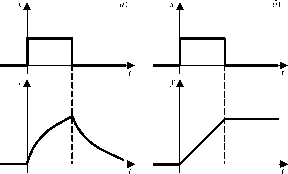 |
|
Рис. 6.2 Переходные процессы при импульсном возмущении: а - апериодическое звено первого порядка; б - интегральное |
Рассмотрим следующий пример (рис. 6.3):
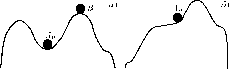 |
| Рис. 6.3 Полуустойчивые состояния равновесия |
Рассматривая нелинейные системы, вводят понятия устойчивости "в малом”, "в большом " и "в целом ":
- система устойчива "в малом", если лишь констатируется факт наличия области устойчивости, но границы ее не определены;
- система устойчива "в большом", когда определены границы области устойчивости, т.е. определены границы области начальных отклонений, при которых система возвращается в исходное состояние;
- система, которая возвращается в исходное состояние; при любых начальных отклонениях, называется устойчивой "в целом". Для некоторого класса систем устойчивость "в целом" называется абсолютной устойчивостью.
Случай, изображенный на рис. 6.1, а, соответствует устойчивости "в целом", а на рис.
6.3, а - либо "в большом", либо "в малом". В рассмотренном примере с шаром вопрос об устойчивости решается просто, но в общем случае не всегда ясно, при каких условиях равновесное состояние системы будет устойчиво.
Как уже неоднократно отмечалось, линейная система автоматического регулирования в общем случае описывается линейным дифференциальным уравнением с постоянными коэффициентами (3.8) и начальными условиями (3.9).
Регулируемая величинаy(t) представляет собой решение уравнения (3.8):
\(W) = \св(0 + \вын(0. (6.1)
Относительно составляющих \св(Д и \вын(0 решения (6.1) подробно говорилось в п. 3.4. При рассмотрении вопросов устойчивости интерес вызывает только свободная составляющая, определяемая общим решением однородного дифференциального уравнения (3.8) без правой части. Физический смысл этой составляющей заключается в том, что это как раз то решение, которое отлично от нуля только в течение переходного процесса и исчезает при установившемся режиме. Вынужденная составляющая выходной величины, зависящая от вида внешнего воздействия и правой части дифференциального уравнения (3.8), на устойчивость системы не влияет.
Состояние равновесия системы определяется решением уравнения (3.8). Так как дифференциальное уравнение имеет единственное решение, то и состояние равновесия
единственно.
108
Математическое определение понятия "устойчивости" формулируется следующим образом. Система является устойчивой, если свободная составляющая переходного процесса с течением времени стремится к нулю, т.е.
усв(') о 0 при t о® (6.2)
При этом выходная координата системы будет стремиться к вынужденной составляющей, определяемой внешним воздействием и правой частью уравнения (3.8).
Если свободная составляющая неограниченно возрастает, т.е.
усв(') о ® при t о® , (6.3)
то система неустойчива.
Понятие устойчивости распространяется и на более общий случай - движение системы.
6.2 УСТОЙЧИВОСТЬ ЛИНЕЙНОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ
Как известно, поведение системы после снятия возмущения, т.е. свободное движение, описывается решением однородного дифференциального уравнения с постоянными коэф фициентами:
и заданными начальными условиями.
С этим уравнением связан характеристический полином:
Без ограничения общности предположим, что корни этого полинома различны, тогда решение уравнения записывается в виде
j
Исследуем характер решения. Пусть, например, корень s1 - действительный, тогда возможны два случая:
а) s1 < 0. В этом случае составляющая ЦС1' имеет вид кривой, асимптотически
приближающейся к оси абсцисс t о® (рис. 6.4, а).
Действительно, при «і < 0 имеет место условие
m = C1es1' о 0, t о ®.
Таким образом, если все корни - действительные отрицательные, то и все слагаемые будут стремиться к нулю, а, следовательно, и их сумма.
Пу сть
в) Im^
6)
ин из корней действителен и положителен, ?1 > О, тогда абсолютная rZcMoro C1eS1‘ будет безгранично возрастать при 1 о f (рис. 6.4, б), т.е. Сіе?і' о у о f даже в том случае, когда все остальные слагаемые
 |
V I Re ичина с |

f приьА 1 оf. В зтом случае еш ия-стремятся к нулю при 1
f.
ImA
\і = q eVl11
>
Re
?і
ImA
>
Re
I
V2*
ImA
Vi,
-->
Re
V2,
Рис. 6.4 Изображение
составляющих решения дифференциального уравнения:
а - корни действительные отрицательные; б - корни действительные положительные; в -корни комплексно-сопряженные с отрицательной действительной частью; г - корни комплексно-сопряженные с положительной действительной частью; б - корни мнимые; е -нулевой корень
в) Пусть уравнение (6.5) имеет комплексно-сопряженные корни. Здесь также возможны два случая. Первый случай, если ?1>2 = а ± гю, причем а < О, тогда решение
\1 = cie6i1 + CieS2t = Ceа1 sin(Z1 + ф) представляет собой затухающие колебания с частотой ю (рис.
6.5, в), так как eaw о о при t 0f, и, следовательно, все выражение также стремится к нулю при возрастании 1.
Если комплексно-сопряженные корни имеют отрицательную действительную часть, то соответствующие члены решения стремятся к нулю при 10f .
г) Пусть а > О. В зтом случае решением являются колебания с нарастающей амплитудой (рис. 6.4, г), так как ea1 о f при t — f , следовательно, Уі = c1eSlt + C2eS2t = Ceat sin(rat + ф) о f .
д) Допустим теперь, что уравнение (6.5) имеет мнимые корни, т.е. ?12 = ± гю, тогда решение будет иметь вид: у1 = qH® + C2e-iZ = = Csin(z1 + ф), т.е. незатухающие колебания (рис. 6.4, б).
е) Пусть уравнение имеет нулевой корень ?1 = О, в зтом случае у1 = C, т.е. решение представляет собой константу.
Составляющую решения усв(1) дает общее решение уравнения без правой части, которую часто называют переходной составляющей решения. Устойчивая система характеризуется
тем, что усв(1) о О при 1 о f. Если же зто условие не соблюдается, то система
110
| -Н | > |
| с | А |
Для устойчивости системы необходимо и достаточно, чтобы все корни характеристического уравнения имели отрицательные дейст-вительные части. Геометрическая интерпретация этого признака показана на рис. 6.5.
Отсюда вытекает следующая формулировка признака устойчивости: для устойчивости системы необходимо и достаточно, чтобы все корни характеристического уравнения находились в левой полуплоскости комплексной переменной ?. Если хотя бы один корень лежит справа от мнимой оси, то система неустойчива. Если же хоть один корень лежит на мнимой оси, система находится на границе устойчивости. Мнимая ось iz является границей устойчивости. Если характеристическое
?з
Рис. 6.5 Геометрическая интерпретация признака устойчивости:
а - все корни с отрицательной действительной частью;
[ - часть корней имеет положительную действительную часть уравнение имеет одну пару мнимых корней, а все остальные корни находятся в левой полуплоскости, то система находится на колебательной границе устойчивости. Если же уравнение имеет нулевой корень, то система находится на апериодической границе устойчивости.
6.3 ИЗОБРАЖЕНИЕ ДВИЖЕНИИ В ФАЗОВОМ ПРОСТРАНСТВЕ
6.3.1 Понятие фазового пространства
При рассмотрении устойчивости движения чрезвычайно полезным оказалось введение некоторых наглядных понятий и представлений геометрического характера. Основным из них является понятие фазового пространства, введенное академиком Андроновым.
Фазовым пространством называется такое пространство, в котором прямоугольными координатами точки являются величины, определяющие мгновенное состояние системы, называемые фазовыми координатами.
Метод фазового пространства применим как для линейных, так и для нелинейных систем.
Любое дифференциальное уравнение п-го порядка можно записать в виде системы из п линейных дифференциальных уравнений первого порядка:
dyx(t)/ dt = an yx(t) + an y2(t) +... + aXnyn (t) + xx(t); dy2(t) / dt = a2!(t) + a22У 2(t) + ... + a2n\n (t) + x2(t);
dyn (t) / dt = anlУп (t) + an2Уп (t) + ... + annyn (t) + xn (t).
описывающий переходный процесс при наличии возмущений x(t) = {Xj, Х2,..., Xn}.
В качестве фазовых координат выбирают выходную координату системы и ее производные.
Точка фазового пространства (рис. 6.6), соответствующая состоянию системы в данный момент времени t, называется изображающей точкой (F).
Изменение состояния системы во времени будет соответствовать движению изображающей точки в фазовом пространстве по определенной траектории, которая называется фазовой траекторией.
Каждому переходному процессу в системе соответствует своя определенная фазовая траектория в фазовом пространстве и наоборот.
Метод фазового пространства получил наибольшее распространение при исследовании систем второго порядка. В этом случае фазовым пространством является плоскость. Система дифференциальных урав-
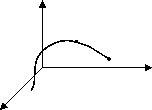 |
| Рис. 6.6 Фазовое пространство |
d\i(t)
= fi( yu \2>; = f2 (\2).
(6.8)
dt
dy 2(t)
dt
Фазовые траектории для систем второго порядка обладают следующими свойствами.
1 В каждой точке фазовой плоскости можно провести единственную касательную к фазовой траектории, т.е. через каждую точку фазовой плоскости проходит только одна траектория. Исключение составляет начало координат: yl = 0, у2 = 0, которое соответствует состоянию равновесия. Уравнение состояния равновесия:
dyi(t) = 0.
I dt
dy 2(t) = 0
„ dt
Направление касательной в начале координат неопределенно, поэтому начало координат, соответствующее состоянию равновесия системы, называется особой точкой.
2 Направление движения на траектории отмечают стрелками. Движение изображающей точки по фазовой траектории происходит по часовой стрелке вокруг начала координат.
3 В точках y 1 = 0, у2 = 0, т.е. в особых точках, происходит остановка движения.
4 В системах второго порядка фазовые траектории пересекают ось абсцисс под прямым
углом, так как при y2(W) = 0, -5\ = f, а yi(t) = y(t) достигает своего максимума.
5т
5 В верхних квадрантах координатной плоскости изображающая точка движется всегда слева направо, а в нижних - справа налево, так как при у гИ> = 'У 1 “’ > о переменная
yi(W) = y(W) возрастает, а при у 2 и, = * 1 “ ’ . о переменнаяу1 (W) = y(W) убывает.
6 В любой точке фазовой плоскости, где переменная y2(W) и функция f2(y1, у2) не равны нулю, фазовая траектория имеет только одно определенное направление, соответствующее
производной- в данной точке, откуда следует, что фазовые траектории не пересекаются.
Начальные условия переходного процесса определяют координаты начальной точки М0 на фазовой траектории.
Совокупность фазовых траекторий, соответствующих всем возможным в данной системе начальным условиям, называется фазовым портретом системы.
6.3.2 Фазовые портреты линейных систем второго порядка
Для получения уравнений, описывающих фазовый портрет системы второго порядка, необходимо в системе дифференциальных уравнений (6.8) второе уравнение поделить на первое и исключить из рассмотрения время W, в результате чего получают:
Решение этого уравнения дает семейство интегральных кривых на фазовой плоскости, по которым строятся фазовые траектории системы.
Фазовые портреты линейных систем второго порядка классифицируются по типам особых точек.
Линейная система второго порядка описывается дифференциальным уравнением вида
- - (6.9)
где y(W) - выходная координата системы; а0, а1, а2 - постоянные коэффициенты.
Обозначив y(W) = y1(W), а dy1(t) = y2(t), тогда
dt
и уравнение (6.9) можно записать в виде системы дифференциальных уравнений:
ЛІ
(6.10)
Разделив второе уравнение на первое, получают

(6.11)
решением которого будет уравнение фазовых траекторий
\2= ./(уі, Cl, С2), (6.12)
где cl - постоянные интегрирования.
Возможны шесть различных случаев фазовых траекторий в зависимости от корней характеристического уравнения а2 s2 + a1 s + а0 = 0.
Случай 1
Корни - мнимые при а1 = 0, а0> 0, а2 > 0: s1j2 = +iz;
= . Система находится на границе устойчивости.
Уравнение системы: а2у1”(і) + а0у1(і) = 0, его решение имеет вид
у1(і) = $sin(zt + E), (6.13)
откуда
у2(і) = У1'(і) = cos(zt + P). (6.14)
График у1(і) показан на рис. 6.7.
 |
|
Рис. 6.7 Фазовый портрет типа центр: а - плоскость корней характеристического уравнения; б - переходный процесс; в - фазовый портрет |
-- . (6.15)
Выражение (6.15) представляет собой уравнение эллипса с полуосями $ и $z. Задавая различные :, получают семейство фазовых траекторий, которые нигде не пересекаются и имеют общий центр в начале координат (рис. 6.7, в).
Направление движения изображающей точки М в каждой половине фазовой плоскости определяется по знаку у2. При положительной величине у1 может только увеличиваться, а

при отрицательном y2 - уменьшаться, следовательно, движение изображающей точки на фазовой плоскости происходит по часовой стрелке, поэтому незатухающим периодическим колебаниям в системе соответствует на фазовой плоскости замкнутая фазовая траектория. Особая точка системы является геометрическим центром фазовых траекторий и носит
название центр, а сама система называется консервативной (т.е. система без рассеивания
энергии, без трения).
Случай 2 Корни - комплексные и имеют отрицательные вещественные части при а\ < 4а0а2; аі > 0, а2 > 0, а0 > 0:
6і,2 = -а ± т (рис. 6.8, а), а = -а\І2а2, Z = (1І2а2)^ - система устойчива.
Решение уравнения (6.9) имеет вид:
y1(t) = A e~at sin(rot + р). (6.16)
Рис. 6.8 Фазовый портрет типа устойчивый фокус:
а - расположение корней характеристического уравнения; б - переходный процесс; в - фазовый портрет
Откуда
y2 (t) = y'(t) = jAeat сos(юt + E + 5), (6.17)
где
Уравнения (6.16) и (6.17) дают в фазовой плоскости параметрическое уравнение спиралей (с параметром t). С каждым оборотом, соответствующим одному периоду колебаний, изображающая точка приближается к началу координат, так как значения y1 и у2 за период колебаний становятся меньше, т.е. переходный процесс имеет характер затухающих колебаний.
Особая точка называется устойчивым фокусом.
Случай 3 Корни - комплексные и имеют положительные вещественные части при а2і < 4а0аі; а0 > 0, аі < 0, а2 > 0: «і,2 = а + і&.
Этот случай соответствует расходящимся колебаниям в системе, т.е. система является неустойчивой. Решение уравнения (6.9):
y1(t) = Aeat sin(rot + E).
y2(t) = y'(t) = yAeat сos(юt + E + 5). (6.17)
(6.18)
Откуда

Фазовая точка, двигаясь по фазовой траектории, неограниченно удаляется от начала координат.
Состоянию неустойчивого равновесия системы соответствует особая точка, которая называется неустойчивый фокус (рис.6.9).
Если в результате сколь угодно малого возмущения система выйдет из состояния равновесия, то она будет неограниченно удаляться от

Рис. 6.9 Фазовый портрет типа неустойчивый фокус:
z - расположение корней характеристического уравнения;
[ - переходный процесс; в - фазовый портрет
него по спирали фазовой траектории, т.е. в системе возникает колебательный процесс с возрастающей амплитудой.
Случай 4 Корни - вещественные отрицательные при а2 1 > 4а0а2, а\ > 0, а2> 0, а0 > 0:
?і,2 = - а + р; — ^ .
сама система
Этот случай соответствует апериодическому процессу в системе, устойчива.
Решение уравнения (6.9) Откуда
уі(0 = \2(W) =
(6.20)
(6.21)
Границей области с переходными процессами типа 1 и 2 служат прямые с уравнениями \2 = -?2\1 и \2 = -?1 \1 , которые получаются из (6.20), (6.21) при ?1 = 0 или ?2 = 0 (обращение одного из корней в нуль).
Все фазовые траектории вливаются в начало координат - особую точку, называемую устойчивыім узлом (рис. 6.10). Время движения к состоянию равновесия теоретически равно бесконечности.
| б) |  |
| a) y-jj | к |
| а у3 | Ь |
| ~ W |
а - расположение корней характеристического уравнения; б - переходный процесс; в - фазовый портрет
Случай 5 Корни - вещественные положительные при а\ > 4а0а2, а1 < 0, а2 > 0, а0 > 0: v ij2 = а + р.
В системе будет апериодический процесс, она неустойчива. Решение уравнения (6.9):
yi(t) = . (6.22)
^
Рис. 6.11 Фазовый портрет типа неустойчивый узел:
z - расположение корней характеристического уравнения;
б - переходный процесс; в - фазовый портрет
Откуда:
\2(t) = y'(t) = . (6.23)
Фазовые траектории направлены от начала координат в бесконечность, т.е. если в системе имеется отклонение от состояния равновесия (начало координат), то с течением времени оно будет неограниченно возрастать.
Особая точка носит название неустойчивый узел (рис. 6.11). По аналогии со случаем 4 кривым переходного процесса вида 1 соответствуют фазовые траектории вида 1, где крайние траектории определяются уравнениями y2 = v1y1 и y2 = s2y1. Кривым переходного процесса 2 соответствуют фазовые траектории вида 2.
Случай 6 Корни - вещественные и имеют различные знаки при а1 > 0, а2 > 0, а0 < 0: v1 = -а1, v2 = р. В этом случае будет неустойчивая система (при а0 = 0 - граница устойчивости).
Переходный процесс в системе имеет апериодический характер, но фазовый портрет имеет совершенно другой вид.
О, и, учитывая, что а0 <0, уравнение (6.9) запишется
(6.24)
Интегрирование этого уравнения дает:
(6.25)

Рис. 6.12 Фазовый портрет
типа седло:
а - расположение корней характеристического уравнения; б - переходный процесс; в - фазовый портрет
Выражение (6.25) представляет собой уравнение семейства равносторонних гипербол,
отнесенное к главным осям. Асимптота гипербол: \2 = ± юуь
Каждая из асимптот состоит из трех фазовых траекторий, т.е. особая точка рассматривается как одна из фазовых траекторий.
Особая точка носит название седло, а асимптоты на фазовой плоскости называются
сепаратрисами седла (рис. 6.12).
По двум сепаратрисам изображающая точка приближается к состоянию равновесия, а по двум другим удаляется от него.
Двигаясь по любой фазовой траектории, изображающая точка по истечении достаточно большого времени удаляется от состояния равновесия на сколь угодно большое расстояние.
Седло является неустойчивым состоянием равновесия, даже когда начальные условия точно соответствуют точке на сепаратрисе, малейшее возмущение приводит к тому, что изображающая точка, попав на соседнюю траекторию, будет неограниченно удаляться по ней от состояния равновесия.
6.4 ПОНЯТИЕ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Теория устойчивости движения была создана в начале нашего века великим русским математиком Александром Михайловичем Ляпуновым (1857 - 1918) в связи с задачами небесной механики.
Любая система, будь она идеальной (если на нее не действуют никакие возмущения) или реальной, описывается дифференциальными уравнениями, решение которых определяет траекторию ее движения.
Движение называется невозмущенным, если оно получено в результате рассмотрения идеализированной системы.
Движение с учетом возмущений, возникающих в реальной системе, называется возмущенныім.
Невозмущенное движение называется устойчивыім, если достаточно малые возмущения сколь угодно мало отклоняют возмущенное движение от невозмущенного. Если же возмущенное движение заметно отклоняется от невозмущенного при сколь угодно слабых возмущениях, то оно называется неустойчивым.
В теории устойчивости существуют различные понятия (термины), как то: орбитальная устойчивость (устойчивость по траектории), устойчивость по Ляпунову, асимптотическая устойчивость и т.д.
Прежде чем перейти к определению этих понятий, необходимо уточнить, что понимается под малыми возмущениями. Любые возмущения можно разделить на два типа.
1 Импульсные возмущения.
 |
|
Рис. 6.13 Действие импульсного возмущения: а - импульсное возмущение; б - движение в фазовом пространстве |
времени At. _
Обозначим через уі0 координаты точки Мо, L = 1, ..., q; через у'і0 - Мо, . При малом сдвиге разность координат мала по абсолютной величине, т.е. удовлетворяет условию где к - некоторое достаточно малое положительное число.
Рис. 6.14 Непрерывно действующие возмущения
Малым возмущением называется такое импульсное возмущение, которое вызывает малый сдвиг начального положения изображающей точки системы.
Малым возмущениям соответствуют малые к, чем меньше к, тем меньше возмущения.
2 Непрерывно действующие возмущения.
Такие возмущения действуют на систему не только в начальный момент времени, но ив последующие (рис. 6.14). На первый взгляд кажется, что учет таких возмущений сделает более общими и выводы, так как они имеют более общую форму, чем импульсные. Но на практике оказывается не так. Системы, устойчивые при импульсных возмущениях, устойчивы и при непрерывных; неустойчивые при первом типе - неустойчивы и при втором. Причиной этого является тот факт, что непрерывное возмущение можно представить в виде последовательности импульсов, т.е. разрезать весь график x(t) на импульсы длительностью dt, поэтому в дальнейшем рассматриваются лишь импульсные возмущения.
6.5 ОСНОВНЫЕ ВИДЫ УСТОЙЧИВОСТИ
6.5.1 Орбитальная устойчивость
Вводится понятие s-окрестности невозмущенного движения. С этой целью рассматривается траектория невозмущенного движения МоМ и строится криволинейный цилиндр радиусом в, осью которого является эта траектория.
Считается, что траектория возмущенного движения мало отклоняется от траектории невозмущенного движения, если она целиком лежит в s-окрестности невозмущенного движения (s - мало). Возмущенное движение исходит из точки М 'о (рис. 6.15).
Устойчивость - это свойство движения, имеющее качественный, а не количественный характер. Поэтому при формулировке понятия устойчивости важна лишь принципиальная возможность подобрать столь малое к, чтобы кривая возмущенного движения не вышла из s-ок-рестности невозмущенного движения при любом значении s. Если такая возможность существует, то движение устойчиво, если она отсутствует, то неустойчиво.
0
Рис. 6.15 К понятию "Орбитальная устойчивость"ри любом s можно , чтобы траектория
Говорят, система обладает орбитальной устойчивостью, если п подобрать такое отличное от нуля значение к в выражении
возмущенного движения не вышла из s-окрестности невозмущенного движения, то последнее называется устойчивым. Если же подобрать такое к нельзя, то невозмущенное движение неустойчиво.
120
Понятие орбитальной устойчивости имеет существенный, принципиальный недостаток, ограничивающий пределы его применимости. При орбитальной устойчивости возмущенное движение может значительно отличаться от невозмущенного.
Если даже траектории и близки, но точки М и М' движутся с разными скоростями, то с течением времени расстояние между ними может оказаться большим (рис. 6.16), т.е.сли yL -координаты точки М, а у\ - М', то при наличии орбитальной устойчивости может оказаться, что величины (у - y'L) станут большими. В связи с этим вводится понятие устойчивости по Ляпунову. _
Рис. 6.16 К понятию устойчивости по Ляпунову
6.5.2 Устойчивость по Ляпунову
Движение называется устойчивым по Ляпунову, если для любого в >0 можно указать число к = р(в) > 0 такое, что из неравенства при W = W0 следует
для всех W > W0.
неравенство
Смысл понятия устойчивости по Ляпунову состоит в том, что движение устойчиво, если при достаточно малом начальном сдвиге М'0 от М0 точка М' в последующем движении достаточно близка к М (рис. 6.16). Если же подобрать такое p(s) нельзя, то движение неустойчиво.
6.5.3 Асимптотическая устойчивость
Под устойчивостью очень часто понимают свойство тела возвращаться в состояние равновесия, из которого оно предварительно было выведено, например, маятник после затухающих колебаний вернется к положению равновесия (рис. 6.17). Подобное определение можно ввести и для невозмущенного движения.
 |
| Рис. 6.17 К определению асимптотической устойчивости |
Движение называется асимптотически устойчивым, если можно подобрать такое р, что,
при W o f.
если
, то выполняется условие
Понятие асимптотической устойчивости более узко, чем понятие устойчивости по Ляпунову. Если движение асимптотически устойчиво, то оно наверняка устойчиво по Ляпунову. Но обратное утверждение, вообще говоря, несправедливо. Движение может быть устойчивым по Ляпунову, но не являться асимптотически устойчивым.
6.6 НЕОБХОДИМОЕ УСЛОВИЕ УСТОЙЧИВОСТИ
В п. 6.2 получено необходимое и достаточное условие устойчивости - отрицательность действительных частей корней характеристического уравнения или, что идентично, эти корни должны располагаться слева от мнимой оси.
В этих формулировках изложен не только признак устойчивости, но и дан, в сущности, метод исследования устойчивости: необходимо найти корни характеристического уравнения и проверить, лежат ли они в левой полуплоскости или нет. Однако такой метод совершенно неадекватен задаче исследования в силу следующих причин.
1 Задача определения корней характеристического уравнения просто решается только для уравнений первого и второго порядка; для всех других случаев приходится пользоваться различными приближенными, сравнительно громоздкими методами.
2 Для определения устойчивости необходимо знать только знаки корней, поэтому определение корней представляет ненужную трудоемкую работу. Между тем не получают общих формул, по которым можно было бы судить о влиянии коэффициентов уравнений на устойчивость системы, но именно это влияние, в первую очередь, и интересует проектировщика системы автоматического регулирования.
Задача исследования часто ставится таким образом, что необходимо определить коэффициенты уравнений, при которых система была бы устойчива.
В распоряжении исследователя имеются методы, позволяющие судить об устойчивости системы по так называемым условиям устойчивости, не решая характеристического уравнения и не находя его корней. Первым таким условием, которое следует рассмотреть, является необходимое условие устойчивости.
Пусть характеристическое уравнение п-й степени имеет корни v1, s2, ..., sn. Тогда это уравнение можно записать следующим образом
ап о - V1 ) 0 - V2 ) ... О - Sn) = 0. (6.26)
Если система устойчива, то корни должны быть либо действительными отрицательными, либо комплексно-сопряженными с отрицательной действительной частью.
Пусть s1 = -а, а > 0, тогда s - s1= s + а > 0.
Пусть s2,3 = -а ± i Z, а > 0, тогда
(s - s2) (s - s3) = (s + а - L z) (s + а + L z) = (s + а)2 + z2 > 0.
Отсюда следует, что после раскрытия скобок все коэффициенты уравнения будут положительны. Из этих рассуждений следует, что, когда хоть один из коэффициентов характеристического уравнения отрицателен, то система неустойчива.
Если все коэффициенты характеристического полинома aL > 0, то любое действительное положительное значение S, подставленное в уравнение, не может обратить его в нуль и, следовательно, не является корнем характеристического уравнения. Поэтому при aL > 0 невозможно появление нарастающих экспонент, характеризующих апериодическую неустойчивость, т.е. апериодическая неустойчивость невозможна. Однако может возникнуть колебательная неустойчивость, т.е. появление в решении составляющих в виде колебаний с нарастающей амплитудой. Это возникает, когда существуют комплексно-сопряженные корни с положительной действительной частью. Поэтому условие положительности коэффициентов при порядке системы больше двух является необходимым условием, но не достаточным, а для уравнений первого и второго порядка это условие является и достаточным.
Действительно:
а2 s2 + а1 s + а0 = 0; s 1j2=
Если корни комплексно-сопряженные, то а12 -4 а0 а2< 0, а1> 0; а2 > 0. Следовательно, и а0> 0, так как а12 < 4 а0 а2 .
6.7 АЛГЕБРАИЧЕСКИЕ КРИТЕРИИ УСТОЙЧИВОСТИ
Критерий устойчивости Рауса и Гурвица позволяет по коэффициентам характеристического уравнения без вычисления его корней сделать суждение об устойчивости системы.
Словацкий ученый А.Стодола, преподававший в Швейцарии, поставил перед швейцарским математиком Гурвицем задачу нахождения условий устойчивости для линейной системы любого порядка. Такую же задачу поставил Максвелл в своем докладе, на котором присутствовал английский математик Раус. В результате, независимо друг от друга и в различных формах, Раус и Гурвиц вывели неравенства, соблюдение которых является необходимым и достаточным условием устойчивости систем любого порядка.
6.7.1 Критерий устойчивости Рауса
Критерий, который предложил Раус, наиболее просто поясняется табл. 6.1, где D(s) = а0 sn + а1 sn-1 + ... + ап-1 s + ап - (6.27)
характеристический полином.
| Таблица 6.1 | |||||||||||||||||||||||||||||||||||||||||||||||||
|
Ск,і с?+1,і-2 Гі cN+1, і-Ь (6.28)
где rL = c1jL-2 /c1jL-1; N - номер столбца; i - номер строки.
Число строк таблицы Рауса равно степени характеристического полинома плюс единица - (п + 1). После заполнения таблицы можно сделать следующее суждение об устойчивости системы согласно условию устойчивости Рауса.
Для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы коэффициенты первого столбца таблицы Рауса имели один и тот же знак, т.е. при а0 >0 были положительными числа:
сіі = ао > 0; сі2 = аі > 0; сі3 > 0; ...; сц„ + i > 0. (6.29)
Если не все коэффициенты первого столбца положительны, то система неустойчива, а число правых корней равно числу перемен знака в первом столбце таблицы Рауса.
Этот критерий очень удобен, когда заданы численные значения коэффициентов характеристического уравнения, очень легок для программирования на ЭВМ и нашел широкое применение при исследовании влияния на устойчивость коэффициентов уравнения либо отдельных параметров системы.
6.7.2 Критерий устойчивости Гурвица
Гурвиц разработал алгебраический критерий устойчивости в форме определителей, составляемый из коэффициентов характеристического уравнения системы.
| Из коэффициентов характеристического уравнения (6.27) строят сначала главный определитель Гурвица (6.30) |
 |
Отчеркивая в главном определителе Гурвица диагональные миноры, получим определители Гурвица низшего порядка.

| 0 | |
| ; |
Номер определителя определяется номером коэффициента по диагонали. Сам критерий формулируется следующим образом.
Для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения а0, т.е. при а0 > 0:
'і> 0; '2> 0; 'з > 0; ...; ' > 0. (6.32)
Если раскрыть определитель Гурвица для уравнений первого, второго и третьего порядка, то получатся следующие условия устойчивости:
1) п = 1; а0 ? + а1 = 0; условия устойчивости: а0 > 0; а1 > 0.
2) п = 2; а0 ?2 + а1 ? + а0 = 0; условия устойчивости: а0 > 0; а1> 0; а2 > 0.
3) п = 3; а0 ?3 + а1 ?2 + а2 ? + аз = 0; условия устойчивости: а0 > 0; а1 > 0; а2 > 0; аз > 0; а1 а2 - а0 а3 > 0.
Критерий Гурвица обычно применяют при п < 4.
Так как Дп = ап Дп.1, то при ап > 0 для проверки устойчивости необходимо проверить определители от Д1 до Дп.1.
Если ап = 0 или Дп.1 = 0 при Д1 > 0, ..., то система находится на границе устойчивости, причем при ап = 0 - граница апериодической устойчивости (один из корней равен нулю); при ап_1 = 0 - граница колебательной устойчивости (имеются два комплексно-сопряженных корня).
По этому критерию можно определить критическое значение параметра, при котором система находится на границе устойчивости.
6.7.3. Критерий устойчивости Льенара-Шипаро
При исследовании устойчивости систем автоматического регулирования, имеющих порядок характеристического уравнения п > 5, рекомендуется использовать одну из модификаций критерия Гурвица, предложенную в 1914 г. П. Льенаром и Р. Шипаром и вошедшую в теорию автоматического управления как критерий устойчивости Льенара-Шипаро, который формулируется следующим образом.
Для того, чтобы система автоматического управления была устойчивой, необходимо и достаточно, чтобы выполнялось необходимое условие устойчивости и чтобы определители Гурвица с четными индексами (или с нечетными индексами) были положительны, т.е.
а0 > 0, а1 > 0, ..., ап > 0; Д2 > 0, Д4 > 0, Дб > 0, ... (6.33)
или
а0 > 0, а1 > 0, ..., ап > 0; Д1 > 0, Д3 > 0, Д5 > 0, ... (6.33, а)
В такой формулировке критерия устойчивости требуется раскрытие меньшего числа определителей, чем по критерию Гурвица.
Пример 6.1 Исследовать на устойчивость с помощью критерия Рауса систему, если характеристическое уравнение имеет вид
'(?) = 3?4 + 5?3 + 2?2 + 7? + 10 = 0.
Из коэффициентов уравнения составляется таблица Рауса.
Таблица Рауса к примеру 6.1
| строк | столбец N | |||
| а N | 1 | 2 | 3 | |
| - | 1 | а0 = 3 | а2 = 2 | а4 = 10 |
| - | 2 | а1 — 5 | аЗ — 7 | а5 — О |
| ГЗ — О,6 | З |
о II СО а |
а2З — 1О | О |
| г 4 — - 2,27 | 4 |
D14 — 15,7 | а24 — О | О |
| U5 — О,14 | 5 | D15 — 1О | а25 — О | О |
Пример 6.2 Исследовать на устойчивость с помощью критерия Гурвица, если характеристическое уравнение имеет вид:
З?з + 2?2 + 4v + 2 — О;
аО — З; а1 — 2; а2 — 4; аз— 2;


'і — 2 > О;
Система устойчива, так как '1 > О, '2 > О, 'з > О.
6.7.4 Устойчивость и установившаяся погрешность
Система автоматического регулирования рассчитывается из условия, что в установившемся режиме должна обеспечиваться малая погрешность, а переходный процесс протекать должным образом, т.е. система должна быть устойчивой (не "раскачиваться") и переходный процесс должен затухать с течением времени. В реальных замкнутых
Рис. 6.18 Переходный процесс в устойчивой системе
АСР обратная связь - отрицательная, и в этом случае на вход системы действует сигнал s(t) — x(t) - \(t). Рассматриваем канал управления.
Если на вход рассматриваемой системы подается ступенчатая функция x(t) — хО, то при устойчивой системе после окончания переходного процесса на ее выходе устанавливается некоторое постоянное значение ууст (рис. 6.18).
Переходный процесс описывается уравнением (З.8). В установившимся режиме все производные равны нулю и уравнение принимает вид:
аО \уст ЕО °О:>
(6.34)
(6.35)
(6.36)
откуда
Разность
ХО \уст
ХО
называется установившимся значением погрешности. Системы, имеющие у? ф 0, называются статическими, а установившаяся погрешность у? - статизмом системы. Иногда рассматривается относительная погрешность или коэффициент статизма 6:
(6.37)
Для достижения малой погрешности в установившемся режиме необходимо иметь большое значение коэффициента усиления системы, но при достаточно большом значении последнего система становится неустойчивой, т.е. возникает конфликт между требованием устойчивости и требованием малой погрешности. Решение этой проблемы можно рассмотреть на следующем примере.
| Пусть задана система, структурная схема которой изображена на рис. 6.19. |
 |
| Рис. 6.19 Структурная схема системы автоматического регулирования |

На этой схеме
Передаточная функция разомкнутой системы будет:
где К - коэффициент усиления системы и К = N1 N2 N3 .
Для установившегося режима уравнение (6.34) принимает вид (1 + К) ууст = К х0, откуда ууст = Кх0 /(1 + К), а статизм системы и коэффициент статизма, соответственно:
У = хо/(1 + К), 6 = 1/(1 + К).
Характеристическое уравнение рассматриваемой системы имеет вид:
Так как все коэффициенты характеристического уравнения третьего порядка положительны, то согласно критерию устойчивости Гурвица система будет устойчива, если выполняется неравенство:
из которого можно определить коэффициент усиления, т.е.:

называется предельным коэффициентом
Величина
усиления. Для устойчивости системы необходимо и достаточно, чтобы коэффициент усиления системы был меньше предельного значения К < Кпр. Если взять Т\= Т2 = Т3 , то Кпр = 8 и, следовательно, К < 8. Если же для получения малой погрешности задать статизм S < 0,01 (S <1 %), то получается К > 100. Разрешение этого конфликта является одной из основных задач. Пути его разрешения различны, так, например, можно изменять постоянные времени Т1, Т2, Тз и добиться требуемого значения коэффициента усиления. Наиболее общий путь разрешения такого конфликта - это изменение структурной схемы, введение дополнительных связей.
В общем случае система называется астатической относительно некоторого возмущающего воздействия f если при f = соші; установившееся значение погрешности ys не зависит от значения f. В такой системе должно присутствовать интегрирующее звено. Установившаяся погрешность в режиме отработки постоянного рассогласования равна нулю.
6.7.5 Область устойчивости
На устойчивость системы автоматического регулирования оказывают влияние параметры системы, это наглядно было видно на примере, рассмотренном выше. Геометрический образ зависимости устойчивости от параметров системы называется областью устойчивости и был введен в рассмотрение И. А. Вышнеградским. Построение областей устойчивости является одним из наиболее ценных для практики результатов исследования устойчивости системы.
Область устойчивости строится в пространстве параметров, под которым понимается пространство, координатами которого являются параметры системы. Количество параметров может быть любым, но для графического изображения наиболее распространенными являются два.
Пусть характеристическое уравнение системы имеет вид
?3 + А ?2 + В ? + 1 = 0, (6.38)
где А и В - параметры системы.
Для устойчивости системы, исходя из критерия Гурвица, необходимо и достаточно, чтобы АВ> 1, откуда граница области устойчивости будет АВ = 1.

В плоскости параметров $ и В граница области устойчивости представляет собой гиперболу, называемую гиперболой Вышнеградского (рис. 6.20). Область устойчивой работы отмечена штриховкой.
Границы области устойчивости могут быть найдены, если приравнять нулю коэффициенты а0, ап характеристического уравнения и предпоследний определитель Гурвица:
ао = 0; ап = 0; Ап_і = 0. (6.39)
Вторая из этих границ соответствует наличию нулевого корня характеристического уравнения, а третья - наличию чисто мнимых корней. Уравнения (6.39) разбивают пространство параметров на ряд областей, из которых устойчивой будет та область, где определители Гурвица А1, ..., Ап_2 положительны.
6.8 ЧАСТОТНЫЕ КРИТЕРИИ УСТОЙЧИВОСТИ
Частотные критерии устойчивости позволяют судить об устойчивости систем автоматического управления по виду их частотных характеристик. Эти критерии позволяют исследовать устойчивость систем высокого порядка и имеют простую геометрическую интерпретацию.
6.8.1 Принцип аргумента
В основе частотных критериев устойчивости лежит следствие известного из теории функции комплексного переменного принципа аргумента. Пусть дан полином п-й степени (6.27):
D(s) = ао sn + ап-і sn 1 + ... +ап.
Этот полином в соответствии с теоремой Безу можно представить в виде
D(s) = ао (s - si) (s - S2) ... (s - ?п), (6.40)
где s/ = аm + iZj - корни уравнения D(s) = 0; j = 1, 2, ..., п.
Каждый корень геометрически может быть изображен вектором, проведенным из начала координат к точке s7- (рис. 6.21, а). Длина его равна модулю комплексного числа, а угол, образованный вектором с положительным направлением действительной оси, -аргументу или фазе комплексного числа.
Величины (s - s/) геометрически изображаются вектором, проведенным из точки s7- к произвольной точке s (рис. 6.21, [).
При s = iZ, например, получают:
D(iZ) = а0 (iZ - s1) (i ю - s2) ... (i ю - s^, (6.41)
и концы всех векторов будут находиться на мнимой оси (рис. 6.21, в). Рассматривая вектор D(iZ), получают, что модуль его равен
I D(i ю) | = а0 j L ю - s1 j ¦ j L ю - s2 | ... | i ю - sn | , (6.42)
а аргумент
. (6.43)
Если принять за положительное направление отсчета углов вращения против часовой стрелки, то при гоменении частоты от -да до +да каждый элементарный вектор поворачивается на угол п, если корень расположен слева от мнимой оси, ина -тс - если справа (рис. 6.21, г).
Рис. 6.21 Принцип аргумента
Если полином имеет т правых корней и (п - т) левых, то при изменении ю от -да до +да изменение аргумента вектора D(i ю) равно сумме углов поворота вектора (і ю - sj), т.е.
(6.44)
Откуда вытекает следующее правило: изменение аргумента D(L ю) при изменении частоты от -да до +да равно разности между числом левых и правых корней уравнения D(s) = О, умноженной на п.
При изменении частоты ю от О до да изменение аргумента вектора D(i ю) будет вдвое меньше

(6.45)
Это правило положено в основу всех частотных критериев.
6.8.2 Критерий Михайлова
Этот критерий по существу является геометрической интерпретацией принципа аргумента и был сформулирован в 1938 г. советским ученым Михайловым.
Рассматривается характеристический полином (6.27):
D(s) = ао sn + d sn 1 + ... + ап.
Замена s = і ю, приводит к комплексному полиному, называемому функцией Михайлова.
D(i ю) = ао (і ю)п + аі (і ю)п-1 + ... + ап = 8(ю) + і 9(ю) = D(ю) еіф(ю), (6.46)
где_|;_
называют соответственно вещественной и мнимой функциями Михайлова; D(Z) - модуль D(m); ф(ю) - фаза D(i ю).
При изменении частоты конец вектора D(L ю) будет описывать некоторую кривую в комплексной плоскости, которая называется годографом Михайлова.
При изменении частоты от 0 до f угол поворота вектора D вокруг начала координат равен (6.45): _
0
отсюда число правых корней полинома0
(6.47)(6.48)
т.е. т = 0, если
"0
Последнее является необходимым условием устойчивости, но недостаточным. Для того, чтобы получить необходимое и достаточное условие устойчивости, необходимо исключить корни, лежащие на мнимой оси, т.е. должно выполняться условие:
D(i ю) z 0. (6.49)
Формулы (6.48 - 6.49) представляют собой математическое выражение критерия устойчивости Михайлова. Для того, чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы годограф Михайлова D(i ю) при изменении ю от 0 до f повернулся, не проходя через нуль, вокруг начала координат против часовой стрелки на
угол I |, где п - порядок характеристического уравнения.
Для устойчивых систем годограф Михайлова начинается при ю = 0, на вещественной полуоси, т.е. D(0) = ап; кроме того с ростом частоты фаза должна монотонно возрастать, т.е. вектор должен поворачиваться только против часовой стрелки, так как возрастают фазы элементарных векторов (L ю - sy), являющиеся слагаемыми фазы вектора D(i ю).
В связи с этим критерий устойчивости можно сформулировать следующим образом:
Из полинома в знаменателе передаточной функции АСР (характеристического полинома) образуется, функция Михайлова. Для того, чтобы система автоматического управления быіла устойчива, необходимо и достаточно, чтобыі годограф Михайлова при изменении частотыі от 0 до f, начинаясь при ю = 0 на вещественной положительной полуоси, обходил только против часовой стрелки последовательно п квадрантов координатной плоскости, где п - порядок характеристического уравнения.
Годограф Михайлова для устойчивых систем имеет плавную спиралевидную форму и уходит в бесконечность в том квадранте, номер которого равен степени характеристического уравнения (рис. 6.22).
Признаком неустойчивости системы является нарушение числа и последовательности прохождения квадрантов.
Примеры годографа Михайлова для неустойчивых систем представлены на рис. 6.23:
Рис. 6.23 Годографы Михайлова для неустойчивых систем:
а - начинается на отрицательной действительной полуоси; б - не обходит я-квадрантов координатной плоскости; в - не охватывает начало координат
 |
| Рис. 6.22 Годограф Михайлова |
 |
|
Рис. 6.24 Годограф Михайлова нейтральных систем: а, б - система может быть устойчива; в - система неустойчива |
Построение годографа Михайлова практически производится либо методом контрольных точек, либо методом вспомогательных годографов. Первый метод сводится к определению ряда точек годографа Михайлова, соответствующих фиксированным значениям частоты. При втором методе определяются годографы отдельных звеньев, применяя правила сложения и умножения векторов, строят искомый годограф.
Анализируя годограф Михайлова, можно установить следующее: когда годограф Михайлова последовательно проходит квадранты, то вещественная и мнимая оси пересекаются поочередно. В точках пересечения с вещественной осью обращается в нуль мнимая функция 9(ю), а в точках пересечения кривой с мнимой осью действительная функция 8(ю).
Частоты, при которых происходит пересечение осей, определяются корнями уравнений
(6.50)
Точки пересечения кривых 8(ю) и 9(ю) с осью абсцисс дают значение корней уравнений (рис. 6.25) для 8(ю) = 0: юі, ю3, ю5, ...; для
Рис. 6.25 Действительная и мнимая составляющие функции Михайлова:
а - устойчивая система; б - неустойчивая система 9(ю) = 0: ю0, ю2, ю4,... В этом случае для устойчивой системы обязательно соблюдение неравенства ю0 < ю1 < ю2 < ю3 < ю4 < ...
В связи с этим можно привести следующую формулировку критерия устойчивости:
Система автоматического управления будет устойчива тогда и только тогда, когда вещественная 8(ю) и мнимая 9(ю) функции Михайлова, приравненные нулю, имеют все действительные и перемежающиеся корни, причем общее число этих корней равно порядку характеристического уравнения п, и при ю = 0 удовлетворяется условие 8(0) > 0; 9(0) > 0.
6.8.3 Критерий Найквиста
Этот частотный критерий был разработан в 1932 г. американским ученым Найквистом, он позволяет судить об устойчивости замкнутой системы по виду АФХ разомкнутой системы.
Пусть передаточная функция разомкнутой системы имеет вид
Передаточная функция замкнутой АСР по каналу управления:
Л]
Характеристическое уравнение разомкнутой системы (п-го порядка) определено, как
Характеристическое уравнение замкнутой системы (п-го порядка) выражается, как
Рассмотрим, что представляет из себя выражение 1 + :(?):
Л]
(6.51)
- характеристические полиномы, соответственно, замкнутой и разомкнутой АСР. Подставляя ? = i Z, получим
где
ЛІ
АФХ разомкнутой системы (рис.6.26).
следовательно, включает в себя свойства замкнутой и разомкнутой
Вектор
системы, и по тому, как ведет себя W(i м) относи
 |
| Рис. 6.26 АФХ разомкнутой системы |
Выделим три случая состояния равновесия разомкнутой системы: устойчива, нейтральна и неустойчива.
1 случай - система в разомкнутом состоянии устойчива. Тогда изменение аргумента характеристического полинома разомкнутой системы согласно критерию устойчивости Михайлова будет равно (6.48):
Для того, чтобы замкнутая система была устойчива, должно выполняться равенство
(6.48):
Отсюда следует, что приращение аргумента вектора
равно нулю:
(6.52)
Соотношение (6.52) означает, что для устойчивости замкнутой системы необходимо, чтобы вектор , начало которого находится в точке (-1, L0), а конец, скользя по АФХ
разомкнутой системы, не охватывал точку (-1, L0) при изменении м от 0 до f (рис. 6.27).
а - разомкнутой системы; б - функции Н(і ю)
Таким образом, критерий Найквиста гласит:
Если разомкнутая система автоматического управления устойчива, то замкнутая система автоматического управления будет устойчива, если амплитудно-фазовая характеристика разомкнутой системы не охватывает точку (-1, L0) при изменении ю от О до да.
2 случай - система в разомкнутом состоянии неустойчива.
При рассмотрении многоконтурных и одноконтурных систем регулирования, содержащих неустойчивые звенья, разомкнутая система может оказаться неустойчивой.
Пусть в разомкнутом состоянии система неустойчива, при этом характеристическое уравнение разомкнутой системы имеет т корней в правой полуплоскости. Тогда согласно принципу аргумента (6.25):

Если потребовать, чтобы система в замкнутом состоянии была устойчива, то должно выполняться равенство (6.48):

будет равен
В этом случае угол поворота вектора Н(і ю)

(6.53)
Последнее говорит о том, что АФХ функции Н(і ю) при изменении частоты от 0 до да
охватывает начало координат в положительном направлении Q раз.
Число оборотов вектора Н(і ю) вокруг начала координат равно числу оборотов вектора АФХ разомкнутой системы W(L ю) вокруг точки (-1, L0). На основании этого вытекает следующая формулировка критерия Найквиста.
Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая система автоматического управления была устойчива, необходимо и достаточно, чтобы АФХ разомкнутой системы W(Lю) при изменении частоты от 0 до да
раз, где т - число правых корней
охватывала точку (-1, L0) в положительном направлении
характеристического уравнения разомкнутой системы.
На рис. 6.28 изображены в качестве примера АФХ Н(і ю) и АФХ разомкнутой системы, соответствующие устойчивой замкнутой системе, которая в разомкнутом состоянии неустойчива и т = 2.
При сложной форме W(L ю) могут возникнуть затруднения при определении числа ее оборотов вокруг точки (-1, L0). В этом случае удобно применять "правило переходов", предложенное Я. 3. Цыпкиным
Назовем переход W(i ю) через вещественную ось при возрастании ю положительным, если он происходит сверху вниз, и отрицательным, если он происходит снизу вверх. Если W(i ю) начинается или заканчивается на оси, то она совершает полперехода. Тогда критерий Найквиста можно сформулировать следующим образом.
Если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая система автоматического управления была устойчива, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов АФХ разомкнутой системы W(i
ю) через отрезок вещественной оси (-да, -1) при изменении частоты от 0 до да была равна , где т -
число правых корней характеристического уравнения.
В качестве примера на рис. 6.29 изображена АФХ разомкнутой системы: число правых корней т = 2; число переходов - два положи-
Рис. 6.29 АФХ разомкнутой системы при т = 2
 |
| а - Н(і ю); [ - W(i ю) при т = 2 |
тельных, один отрицательный, их разность равна 1 =
устойчива.
3 случай - система в разомкнутом состоянии нейтральна.
В этом случае система должна содержать интегрирующие звенья, и тогда характеристическое уравнение разомкнутой системы имеет корни, равные нулю, и записывается в виде
(6.54)
где ? - порядок астатизма; A1(s) - полином, не имеющий корней, равных нулю. Амплитудно-фазовая характеристика разомкнутой системы записывается в виде
(6.55)
При ю = 0, W(i ю) = f и АФХ претерпевает разрыв, поэтому решать вопрос об устойчивости замкнутой системы трудно, так как неясно, охватывает АФХ точку (-1, L0) или нет.
Чтобы сохранить формулировку критерия для устойчивых в разомкнутом состоянии систем, при построении годографа Михайлова при изменении частоты от -f до +f обходят начало координат по полуокружности бесконечно малого радиуса г. Тогда нулевые корни дадут такой же угол поворота, как левые корни, т.е. каждый из векторов повернется на угол к (рис. 6.30).
0
Рис. 6.30 Обход начала координат по дуге бесконечно малого радиуса иОбходу начала координат по малой дуге геіф соответствует передаточная функция разомкнутой системы
0 (6.56)
При г о 0, радиус 5 о f, а аргумент % меняется от | | до

при изменении 3 от
до
 |
|
Рис. 6.31 АФХ нейтральной разомкнутой системы: а - с астатизмом первого порядка, ? = 1; [ - с астатизмом второго порядка, ? = 2 |
При изменении ю от 0 до f, т.е. г о 0, 0 < ф < большого радиуса, описывая угол от 0 до
, W(L ю) изменяется по дуге бесконечно (рис. 6.31). Критерий Найквиста
формулируется следующим образом.
Система автоматического регулирования, нейтральная в разомкнутом состоянии, устойчива в замкнутом состоянии, если АФХ разомкнутой системы с его дополнением в бесконечности не охватывает точку (-1, ІО) при изменении z от О до х>.
Как видно из рис. 6.31, если разомкнутая система имеет астатизм первого порядка, то замкнутая система устойчива, так как точка (-1, L0) не охватывается, если же астатизм будет второго порядка, то замкнутая система неустойчива - точка (-1, L0) охватывается АФХ разомкнутой системы.
Достоинствами критерия Найквиста являются:
1) применимость при неизвестных уравнениях некоторых звеньев разомкнутой системы;
2) возможность исследования устойчивости систем с запаздыванием.
Пример 6.3 Исследовать устойчивость системы критерием Михайлова, если характеристическое уравнение системы имеет вид
D(s) = 2s4 + 4s3 + 2s2 + 5s + 1 = 0.
Заменяя s = i ю, находятся действительная и мнимая функции Михайлова:
D(i ю) = 2(i ю)4 + 4(i ю)3 + 2(i ю )2 + 5(i ю) + 1,
откуда
8(ю) = 2ю4 — 2ю2 + 1;
9(ю) = ю(—4ю2 + 5).
Годограф Михайлова изображен на рис. 6.32. Его анализ показывает, что система неустойчива. Если использовать следствие, то 8(ю) = 0; 9(ю) =0.
2
Решение этих уравнений дает: ю 1;3 = 1 ± i; ю0 = 0; ю2,4 = ±
Рис. 6.32 Годограф Михайлова к примеру 6.3
Так как имеются комплексно-сопряженные корни, то система неустойчива.
Пример 6.4 Исследовать устойчивость системы автоматического регулирования (рис.
¦2s
6.33), если W1(s) =
W2(s) = е
Jbk. 6.33 Структурой схема ACJ
В разомкнутом состоянии система автоматического регулирования устойчива.
Амплитудно-фазовая характеристика разомкнутой системы записывается: и изображена на рис. 6.34.
Рис. 6.34 АФХ разомкнутой системы к примеру 6.4
Так как амплитудно-фазовая характеристика разомкнутой системы не охватывает точку с координатами (-1, i0), то замкнутая система устойчива.
6.8.4 Применение критериев для исследования устойчивости систем
Сравнение рассмотренных критериев устойчивости позволяет сделать следующий вывод относительно их применимости.
Критерий устойчивости Гурвица целесообразно применять, когда характеристическое уравнение имеет степень не выше четырех (п < 4).
Критерий устойчивости Рауса дает быстрый ответ при численно заданных коэффициентах, им целесообразно пользоваться, когда п >4.
Критерий устойчивости Михайлова целесообразно применять при исследовании сложных многоконтурных систем, когда необходимо выяснить влияние изменения структуры системы и средств стабилизации на ее устойчивость.
Критерий устойчивости Найквиста целесообразно применять при исследовании сложных систем. Этот критерий оказывается единственно применимым, когда часть или все характеристики отдельных элементов системы заданы экспериментально, применим при анализе систем, описываемых аналитическими функциями.
Помимо своего прямого назначения частотные критерии устойчивости могут быть использованы для оценки влияний параметров системы на ее устойчивость.
На рис. 6.35 изображен годограф Михайлова для устойчивой системы. Отрезок ОМ0 равен значению вектора D(i ю) (6.35) при ю = 0 и равен значению коэффициента ап характеристического уравнения.
Можно показать, что коэффициент усиления системы влияет только на свободный член ап характеристического уравнения. Поэтому при его увеличении будет увеличиваться только коэффициент ап, и в этом случае
 |
| Г одограф Михайлова для устойчивых систем _3-го порядка_ |

Рис. 6.36
Структурная схема системы с тремя звеньями
все векторы D(i ю) получают одинаковое положительное действительное приращение, и вся кривая Михайлова без деформации передвигается направо, например, из положения 1 в положение 2 (рис. 6.35). Если увеличивать коэффициент усиления и дальше, то при некотором его предельном значении годограф Михайлова пройдет через начало координат, и система выйдет на границу устойчивости. Дальнейшее увеличение коэффициента усиления сделает систему неустойчивой.
Здесь возможно и обратное решение задачи, а именно, нахождение предельного коэффициента усиления. Отрезок ОМ'о (рис. 6.35) соответствует предельному значению коэффициента (аи)пр, значение которого можно отсчитать и по первоначальному положению кривой Михайлова - отрезок М2Мо.
Оценить влияние параметров системы на ее устойчивость, можно и пользуясь критерием Найквиста. В качестве примера ниже рассмотрена система третьего порядка с тремя инерционными звеньями (рис. 6.36), в которой

Амплитудно-фазовые характеристики разомкнутой системы для различных значений коэффициента усиления N = Кі К2 К3 изображена на рис. 6.37, а.

Рис. 6.37 АФХ статической системы третьего порядка:
а - для различных коэффициентов усиления;
[ - вычерчивание обратных изменений единицы масштаба
Все эти характеристики могут быть получены из "первоначальной" путем изменения масштаба, причем удобнее не вычерчивать характеристику с новым масштабом, а изменять масштаб обратным изменением единицы масштаба. В этом случае достаточно вычерчивать одну АФХ раз и навсегда и уменьшать размер отрезка О А, равного единице, во столько же раз, во сколько увеличивается коэффициент усиления. При этом точка А будет перемещаться вправо (рис. 6.37, [). При малом значении коэффициента усиления N системы масштаб единицы ОА велик, и точка А находится в положении Аі. В этом случае АФХ разомкнутой системы не охватывает точку Аі, и, следовательно, замкнутая система устойчива. При увеличении коэффициента усиления N масштаб единицы уменьшается, критическая точка движется направо и при N = Nnp занимает положение $2, система находится на границе устойчивости.
При N > N-^ критическая точка продолжает перемещаться направо, занимает положение А3, и система становится неустойчивой.
Влияние коэффициента усиления на устойчивость, используя критерий Найквиста, можно проследить и для систем высокого порядка, в частности, с "клювообразными" характеристиками (рис. 6.38, а). В этом случае при малом значении коэффициента усиления критическая точка находится в положении Аі, и замкнутая система устойчива. Увеличение коэффициента усиления передвигает точку в положение А2, N = Nnpl, и система выходит на границу устойчивости. Дальнейшее увеличение коэффициента усиления приводит систему к неустойчивости, так как критическая точка занимает положение А3 и охватывается АФХ. 140
Положение А4, в котором N = Nnp2, является границей устойчивости, а положение As критической точки устойчиво, так как не охватывается АФХ. Таким образом, можно сделать следующий вывод.
Система устойчива при малых значениях коэффициента усиления N < Nnpi и при достаточно больших N > ^р2, имеет две границы устойчивости при N = ^р1 и N = ^р2, неустойчива при ^р1 < N < ^р2.
 |
|
Рис. 6.38 АФХ системы высокого порядка: а - "клювообразная" АФХ первого порядка; [ - "клювообразная" АФХ _второго порядка_ |
0
Рис. 6.39 АФХ простых систем:а - АФХ систем первого порядка; [ - АФХ систем второго порядка
Анализ амплитудно-фазовой характеристики разомкнутой системы, изображенной на рис. 6.38, [, показывает, что система имеет три предельных значения коэффициента усиления ^пр, N2np , ^пр, соответствующие точкам А2, А4, А6 и границе устойчивости. При значениях коэффициента усиления N < ^р1, ^р2 < N < N^р3 система устойчива (точки А1, As), а при
значениях Nvp1 < N < ^р2, N > Nпp3 система неустойчива (точка А3, А7).
Применение критерия Найквиста к исследованию более простых систем - систем первого и второго порядка показывает, что если разомкнутая система является системой первого порядка без запаздывания, то как бы ни изменялись параметры системы, АФХ разомкнутой системы всегда будет располагаться в четвертом квадранте (рис. 6.39, а) и, следовательно, замкнутая система всегда будет устойчивой.
Для разомкнутых систем второго порядка АФХ располагается в нижней полуплоскости и, следовательно, как бы ни изменялись ее параметры, АФХ никогда не охватывает точку (1, L0), и исследуемая замкнутая система всегда будет устойчивой.
Также с помощью критериев устойчивости Михайлова и Найквиста могут быть решены вопросы стабилизации системы. В частности, одним из способов стабилизации является введение гибкой отрицательной связи.
6.8.5 Анализ устойчивости по логарифмическим частотным характеристикам
В инженерной практике иногда анализ устойчивости проводят по логарифмическим частотным характеристикам, построение которых проще, чем амплитудно-фазовой характеристики. Если проследить зависимость между поведением АФХ разомкнутой системы и логарифмической амплитудно-частотной и логарифмической фазочастотной характеристиками, то можно сформулировать критерий Найквиста применительно к логарифмическим частотным характеристикам.
Для того, чтобы система автоматического управления была устойчивой, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов логарифмической фазочастот
 |
|
Рис. 6.40 Частотные характеристики: а - АФХ; [ - логарифмические частотные характеристики |
т - число правых корней характеристичского уравнения разомкнутой системы.
На рис. 6.40 приведены АФХ разомкнутой системы и соответствующие ей ЛАЧХ и ЛФЧХ.
Анализ частотных характеристик показывает, что разность между числом положительных и отрицательных переходов равна нулю, то есть замкнутая система будет устойчива только в том случае, если правые корни будут отсутствовать, т.е. разомкнутая система должна быть устойчивой.
6.9 Д-РАЗБИЕНИЕ
В п. 6.7 было рассмотрено построение областей устойчивости с использованием критерия Гурвица и в качестве примера построена гипербола Вышнеградского. На практике используются другие более общие методы исследования влияния различных параметров системы - на ее устойчивость, т.е. разработаны следующие специальные методы построения областей устойчивости:
1) путем анализа перемещения корней характеристического уравнения в плоскости корней - метод корневого годографа;
2) путем анализа числа корней характеристического уравнения, лежащих в правой полуплоскости, в пространстве параметров системы - метод Д-разбивания пространства параметров, который был предложен и разработан в 1948 г. Неймарком.
6.9.1 Понятие Д-разбиения
Рассмотрим характеристическое уравнение замкнутой системы п-го порядка,
которое всегда может быть приведено к виду:
D(v) = ?п + а1 Vя-1 + ... + ап = 0 (а0 = 1). (6.57)
Представим себе координатное пространство, осями которого являются коэффициенты уравнения, оно получило название пространство коэффициентов. Каждой точке этого пространства соответствуют конкретные численные значения коэффициентов уравнения и соответствующий им полином п-й степени, который имеет п корней, зависящих от численных значений коэффициентов aL. Если изменять эти коэффициенты, то корни будут перемещаться в комплексной плоскости корней этого уравнения
Рассмотрим уравнение третьего порядка
D(s) = v3 + а1 s2 + a2 s + аз = 0 (6.58)
и соответствующее ему пространство коэффициентов ai, a2, a3 (рис. 6.41).
Каждой точке пространства соответствует вполне определенный полином и вполне определенные три корня.
Например, точка М имеет координаты (a1M, a2M, a3M', и следовательно, характеристический полином записывается в виде
D(s) = s3 + a1M s2 + a2M s2 + a3M
и имеет корни 61M, 62М, 63М.
Когда один из корней равен 0 или +i щ, тогда точка пространства будет удовлетворять уравнению
D(i щ) = (L щ)3 + a1(i щ)2 + a2(i щ) + a3 = 0.
| При -f < щ < f этому уравнению соответствует некоторая поверхность Q |
 |
|
Рис. 6.41 Связь корней характеристического уравнения и пространства коэффициентов: a - плоскость корней характеристического уравнения; [ - пространство параметров |
Таким образом, поверхность Q разделяет все пространство на области с равным количеством правых и левых корней, их обозначают D(m), где т - число правых корней характеристического уравнения.
Разбиение пространства параметров на области с одинаковым числом правых корней внутри каждой области и выделение среди полученных областей области устойчивости называется методом Д-разбиения.
Для уравнения третьего порядка можно выделить 4 области D(3), D(2), D(1), D(0), последняя будет областью устойчивости.
Если изменяются не все коэффициенты, а часть из них, например, a1 и a2, при a3 = сошТ то вместо поверхности получим линию, которая является сечением поверхности Q и
Уравнение границы Д-разбиения получают из характеристического уравнения системы заменой ? = i ю.
D(i ю) = (i ю)„ + а1 (i ю)„-1 + ... + а„ = 0. (6.59)
Границу Д-разбиения можно строить не только в пространстве коэффициентов дифференциального уравнения, но ив пространстве параметров системы.
6.9.2 Д-разбиение по одному параметру
Пусть требуется выяснить влияние на устойчивость какого-либо параметра ?, линейно входящего в характеристическое уравнение. Это уравнение можно привести к виду
| разделяет плоскость коэффициентов а\, а2 на области с одинаковым числом правых корней (рис. 6.42). |
 |
| Рис. 6.42 Граница Д-разбиения в плоскости коэффициентов |
D(v) = М(?) + ?1(?) = 0. Граница Д-разбиения определится как
D(i ю) = M(i ю) + ? N(i ю) = 0, (6.61)
откуда
 | ;(ю) + i <(ю). |
Давая значения ю от -да до да, можно вычислить ;(ю) и <(ю) и построить границу Д-разбиения, границу строят только для ю > 0, а для ю < 0 получают зеркальным отображением (рис. 6.43).
Если в плоскости комплексных корней двигаться по мнимой оси при изменении ю от -да до да и штриховать ее слева, то в плоскости параметра ? этому движению будет соответствовать движение по границе Д-разбиения, которую также штрихуют слева. Если же в плоскости ? пересекать границу Д-разбиения по направлению штриховки (1) (рис 6.43), то этому соответствует переход корня из правой полуплоскости в левую, если же против штриховки - то корень переходит из левой полуплоскости в правую. Если штриховка двойная, то мнимую ось пересекают два корня.
Для определения области устойчивости достаточно знать распределение корней при каком-либо одном значении параметра ?. Переходя в плоскости ? от одного параметра к другому, по числу пересечений границы Д-разбиения, направлению и числу штриховок можно определить значение D(p).
Претендентом на область устойчивости является область, внутрь которой направлена штриховка и которая соответствует области с наибольшим числом левых корней. В выбранной области берется значение параметра ? и по любому из критериев система
проверяется на устойчивость.
 |
| вещественной оси, лежащей в области устойчивости, например, отрезок АВ. |
На практике часто требуется выяснить влияние на устойчивость двух, а не одного параметра.
Характеристическое уравнение в этом случае приводится к виду:
D(s) = vN(s) + wM(s) + L(s) = 0, (6.63)
подставляя s = iz, получают уравнение для границы Д-разбиения
D(iz) = vN(iz) + wM(iz) + L(iz) = 0. (6.64)
Если обозначить

(6.65)
то уравнение для границы можно разбить на два:
(6.66)
(6.67)
vNi (z) + %Mi (z) + Li (z) = 0;
?І2 (z) + xM2 (z) + L2 (z) = 0.
Последняя система решается относительно параметров w и v:
;
ЛІ
где
Задавая различные значения частоты ю от -да до да, для каждого из ее значений по параметрическим уравнениям определяются величины ? и w и строится граница Д-разбиения. При этом возможны следующие три случая.
1 При заданной частоте юк определители Az 0; Ді z 0; Д2 z 0 отличны от нуля. В этом случае система совместна, и уравнения (6.66) представляют собой прямые линии в плоскости ? — w (рис. 6.44, а).
 |
|
Рис. 6.44 Иллюстрация существования решения системы уравнений (6.66): а — решение существует; [ - конечных решений нет; в — решение неопределенно |
3 При некотором значении юк все определители равны нулю, тогда ? и w становятся неопределенными. Прямые 1 и 2 сливаются друг с другом, в этом случае получают не точку, а, так называемую, особую прямую (рис. 6.44, в), уравнение которой:
?11(юк) + тМ1(юк) + /1(юк) = 0. (6.68)
Особая прямая не относится к кривой Д-разбиения, так как всем ее точкам соответствует одно и то же значение частоты, и направление движения по ней установить невозможно.
В основном особые прямые возникают при z = 0 или z = да, это в том случае, когда ап = 0 либо а0 = 0, соответственно. Если а0 и ап не зависят от ? и w, то особые прямые отсутствуют.
После построения границы Д-разбиения и особых прямых необходимо их заштриховать, пользуясь следующим правилом: при возрастании z от -да до да граница Д-разбиения штрихуется слева, если A >0, и справа, если A <0.
Так как ? и w являются четными функциями Z, то границы Д-разбиения для
положительных и отрицательных частот совпадают, поэтому кривую Д-разбиения обходят дважды, и она всегда штрихуется двойной штриховкой.
Штриховка особых линий, как правило, одинарная и штрихуется так, чтобы в местах сопряжения с Д-границей заштрихованные и незаштрихованные стороны прямой и кривой были направлены друг к другу (рис. 6.45 а, [).
В тех случаях, когда особая прямая имеет место при некотором конечном значении частоты z = zк z 0 и при этом Д проходит через нуль и меняет знак, особая прямая
штрихуется согласно правилу, но двойной штриховкой (рис. 6.45, в). Если же А не меняет знак, то особая прямая не штрихуется и из рассмотрения выбрасывается (рис. 6.45, г).
После нанесения штриховки определяют область, претендующую на область устойчивости, т.е. область, внутрь которой направлена штриховка.
Пересечение границы Д-разбиения из заштрихованной зоны в незаштрихованную соответствует переходу двух комплексно-сопряжен-ных корней из левой полуплоскости корней в правую, и наоборот. Пересечение особой прямой с одной штриховкой соответствует переходу одного корня.
 |
| Рис. 6.45 Правило штриховки особой прямой при Д-разбиении |
а, б - одинарная штриховка; в - двойная штриховка; г - не штрихуется
6.10 УСТОЙЧИВОСТЬ СИСТЕМ С ЗАПАЗДЫВАНИЕМ И СИСТЕМ С ИРРАЦИОНАЛЬНЫМИ ЗВЕНЬЯМИ
Все реальные системы автоматического регулирования являются системами с запаздыванием. Необходимым и достаточным условием устойчивости линейных систем с постоянным запаздыванием является расположение всех корней характеристического уравнения в левой полуплоскости.
Непосредственное нахождение корней характеристического уравнения
затруднительно, в связи с его транцендентностью, поэтому применяют критерии устойчивости. Однако в обычной форме применим только критерий устойчивости Найквиста.
Если Wp.c(m) - амплитудно-фазовая характеристика разомкнутой системы без запаздывания, а WS,c,W (ію) - амплитудно-фазовая характеристика разомкнутой системы с запаздыванием т, то можно записать:
Wp.c.w(iz) = Wp.c(iz)eiZT;
Мт(ю) = М(ю); фт(ю) = ф(ю) - ют.
Графики АФХ разомкнутых систем без запаздывания и с запаздыванием представлены на рис. 6.46. Как видно из графика, АФХ разомкнутой системы с запаздыванием закручивается, так как фаза при изменении частоты от 0 до + f изменяется от 0 до - f.
Если изменять время запаздывания, то можно найти, так называемое, критическое значение, при котором система будет находиться на границе устойчивости.
 |
| Рис. 6.46 АФХ разомкнутой системы с запаздыванием |
= -1. (6.68)
Wp.c.T (іюкр)
Из соотношения (6.68) можно записать значения фазочастотной харакеристики, при которых пересекается отрицательная действительная ось, т.е.
фт(іЮкр) = ф (Юкр) - ЮкрТкр = - л(2/ + 1), (6.69)
где j = 0, 1, 2, ..., откуда
(6.70)
Минимальное критическое время запаздывания является граничным и определяется при
/= 0:

(6.71)
Его можно определить и графическим способом, для этого проводится окружность единичного радиуса на плоскости АФХ, ее пересечение с АФХ разомкнутой системы без запаздывания определяет ф(юкр), а с запаздыванием позволяет определить юкр и соответственно
ткр .
6.11 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 Всякая система автоматического управления должна работать устойчиво. Под
устойчивостью понимается способность системы возвращаться в первоначальное состояние после снятия возмущения, т.е. y(t) о 0 при t о f. Необходимым и достаточным
условием устойчивости является отрицательность действительной части всех корней характеристического уравнения.
: Какая система называется нейтральной?
В Будет ли система автоматического управления устойчивой, если корни характеристического уравнения:
6і = -2; 62,з = -3 + 4іа; S4 = 5?
С Будет ли система автоматического управления устойчивой, если корни характеристического уравнения расположены слева от мнимой оси?
2 Для ответа на вопрос об устойчивости систем автоматического управления используются критерии устойчивости, позволяющие судить об устойчивости, не находя его корней. И первым является необходимое условие, согласно которому все коэффициенты характеристического уравнения должны быть положительны. Следующей группой критериев являются алгебраические критерии устойчивости, и прежде всего, это критерий Рауса и критерий Гурвица.
: Для каких систем автоматического управления необходимое условие устойчивости является и достаточным?
В Если характеристическое уравнение системы
3S3 + 4S2 + 2S + 1 = 0,
то в соответствии с критерием Гурвица эта система
а) устойчива;
б) неустойчива;
в) находится на границе устойчивости.
С Какими исходными данными необходимо располагать, чтобы для исследования устойчивости можно было применить критерий Рауса?
3 Для исследования устойчивости широко применяются частотные критерии устойчивости. В соответствии с критерием Михайлова строится годограф Михайлова, который для устойчивых систем должен начинаться на действительной положительной полуоси, обходить последовательно, уходя в бесконечность, нигде не обращаясь в нуль, п квадрантов координатной плоскости, где п - порядок характеристического уравнения.
Вторым частотным критерием является критерий Найквиста, позволяющий судить об устойчивости замкнутой системы по АФХ разомкнутой системы, причем разомкнутая система может быть устойчивой, неустойчивой и нейтральной, но замкнутая система при выполнении определенных условий может быть во всех случаях устойчивой
: Сформулируйте критерий Найквиста для случая, когда разомкнутая система не устойчива.
В Будет ли устойчива система автоматического управления в соответствии с критерием Михайлова, если действительная функция Михайлова 8(ю) = 2 - 3ю2; мнимая функция Михайлова 9(ю) = а + 3ю3?
С Пусть разомкнутая система устойчива и имеет АФХ:
лі
Будет ли замкнутая система устойчивой?6.12 ТЕСТ
1 Какая из физических систем будет устойчивой?
2 Какая система называется устойчивой, если после снятия возмущения ...
: Система не возвращается в исходное состояние.
В Принимает новое установившееся состояние, отличное от первоначального. С Система возвращается в исходное состояние.
3 Какая из систем, описываемых уравнением, будет неустойчивой?
: y"(t) + 2 y\t) +з y(t) = о.
В y"’(t) + y"(t) +4 y’(t) + 3 y(t) = о.
Cy"(t) - y’(t) + y(t) = 0.
о. Какой из
4 Объект имеет характеристическое уравнение a3s3 + a2s2 + a1s + a0
определителей является определителем Гурвица:


5 Согласно алгебраическому критерию Гурвица система устойчива, если.
: Все диагональные миноры главного определителя Гурвица положительны.
В Главный определитель Гурвица положителен, а диагональные миноры отрицательны.
С Диагональные миноры главного определителя Гурвица четного порядка положительны, нечетного отрицательны.
6 Какая из систем согласно критерию Михайлова будет устойчивой, если годограф Михайлова имеет вид
7 Какая из систем согласно критерию Михайлова будет находиться на границе устойчивости:

8 Какими должны быть корни характеристического уравнения для устойчивой системы?
: С отрицательной действительной частью.
В С положительной действительной частью.
С Комплексно-сопряженные с отрицательными и положительными действительными частями.
9 Какая из систем будет устойчивой, если действительная и мнимая функции Михайлова имеют вид
 |
| 10 Пусть разомкнутая система устойчива, то какая из замкнутых систем будет устойчива, если АФХ разомкнутой системы имеет вид:_ |

12 Пусть разомкнутая система не устойчива, то какая замкнутая система будет устойчива, если АФХ разомкнутой системы имеет вид:
7 ОБЕСПЕЧЕНИЕ УСТОЙЧИВОСТИ
7.1 УСТОЙЧИВЫЕ И НЕУСТОЙЧИВЫЕ ЗВЕНЬЯ И СОЕДИНЕНИЯ
Все звенья систем автоматического регулирования подразделяются на устойчивые и неустойчивые. Так, элементарные звенья, как уже отмечалось, являются устойчивыми, исключение составляет интегрирующее звено, относящееся к группе нейтральных звеньев. Неустойчивые звенья имеют полюсы в правой полуплоскости и наиболее распространенным примером таких звеньев является квазиинерционное звено.
На устойчивость систем оказывают влияние параметры регулируемого объекта. Для того, чтобы система была стабильной, необходимо обеспечить требуемый запас устойчивости, причем, если параметры определены приближенно или могут изменяться в процессе эксплуатации системы, то запас устойчивости следует задать большим, чем при точно установленных и неизменных параметрах. Достижение устойчивости возможно осуществить также выбором соответствующих элементов системы регулирования. В частности, следует выбирать такие настройки регуляторов, чтобы система была устойчивой.
Чаще всего определяют настройки регуляторов, при которых корни характеристического уравнения замкнутой системы находятся на мнимой оси (АСР находится на границе устойчивости) для того, чтобы затем по известным методикам создать устойчивую АСР с заданными свойствами.
7.2 СИНТЕЗ УСТОЙЧИВЫХ СИСТЕМ
Синтез устойчивых систем автоматического регулирования сводится, как упомянуто выше, к выбору настроек регуляторов таким образом, чтобы замкнутая система автоматического регулирования была устойчивой.
Согласно критерия Найквиста граница устойчивости определяется уравнением
Гоб(/ю)Грег(Я 6l, S2, iz) = -1, (7.1)
геометрически отражающим факт прохождения АФХ разомкнутой системы через точку (-1, L0). Здесь :рег(60, S1, S2, iz) - АФХ ПИД-регулятора; So, S1, S2 - настройки ПИД-
регулятора. Как известно из ПИД-закона регулирования можно получить различные законы регулирования. Рассмотрим синтез устойчивой одноконтурной системы регулирования с различными типами регуляторов.
7.2.1 Построение границы устойчивости для системы с ПИ-регулятором
Граница устойчивости, определяемая по уравнению (7.1), для системы с ПИ-регулятором запишется как
W0б(iz)WPег(So, S1, iz) = -1. (7.2)
Последнее уравнение можно записать в виде системы уравнений, используя амплитудно-частотные и фазочастотные xарактеристики:
ЛІ
(7.2, а)
или вещественные и мнимые частотные характеристики:

(7.2, б)
В плоскости параметров настроек So, S1 ПИ-регулятора строится граница устойчивости (рис. 7.1) по уравнениям (7.2), из которых по заданной частоте определяются настройки So и S1. Полученная кривая и является границей устойчивости, ниже этой кривой располагается область устойчивой работы, а выше - область неустойчивой работы системы регулирования. Точки 1 и 2 на кривой соответствуют границе устойчивости П- и И-регуляторов.
 |
| Рис. 7.1 Граница устойчивости для системы с ПИ-регулятором |
Если в системе автоматического регулирования используется П-регулятор с
передаточной функцией :рег (v) = -S1 , то система уравнений (7.2) принимает вид:
ЛІ
(7.3)
Из второго уравнения системы (7.3) определяется рабочая частота щр (рис. 7.2), соответствующая границе устойчивости, по которой из первого уравнения определяется предельное значение настройки S1:

(7.4)
 |
| Рис. 7.2 Определение частоты для границы устойчивости системы с П-регулятором |
 |
|
Рис. 7.3 Графическое определение предельного значения настройки П-регулятора Увеличение настройки S1 приводит к тому, что АФХ разомкнутой системы начинает увеличиваться и отсекает на вещественной отрицательной полуоси отрезок г = GS1. Дальнейшее увеличение S1 приводит к тому, что при каком-то значении S1 АФХ разомкнутой системы пройдет через точку (-1, L0), т.е. система выйдет на границу устойчивости и г = 1. Это значение S1 будет являться предельным и определится из соотношения Д^пред = 1, |
следовательно, Slпред объекта и измерить отрезок G.
7.2.3 Границы устойчивости для системы с И-регулятором
Для использования в системе автоматического регулирования И- регулятора система уравнений (7.2) определения границы устойчивости записывается в виде:
. (7.5)
Как и в случае использования П-регулятора, из второго уравнения системы (7.5) определяется рабочая частота (рис. 7.4), по которой из первого уравнения определяется предельное значение настройки S0:
Строится АФХ объекта, а затем АФХ разомкнутой системы при S0 = і (рис. 7.5). Для
 |
| При графическом определении предельного значения параметра настройки S0 система уравнений (7.5) записывается в виде |
ГобО'ю)
і.
а его
построения последней вектор АФХ объекта необходимо развернуть на угол
модуль разделить на ю. В результате построения определяется отрезок G, отсекаемый АФХ разомкнутой системы на отрицательной вещественной полуоси. Увеличение значения настройки So приводит к тому, что АФХ разомкнутой системы "распухает" и отсекает уже на отрицательной вещественной полуоси отрезок г, определяемый как г = SoG.
Дальнейшее увеличение So приводит к тому, что АФХ разомкнутой системы пройдет через точку (-1, L0), и следовательно г = і, а отсюда предельное значение настройки И-
регулятора определится как S^^ = .
Таким образом, для того, чтобы синтезировать устойчивую систему, необходимо выбирать настройки П- и И-регуляторов меньше предельных значений, а ПИ-регулятора из области, расположенной ниже границы устойчивости.
7.3 ОЦЕНКА ЗАПАСА УСТОЙЧИВОСТИ
Синтез устойчивых систем, находящихся вблизи от границы устойчивости и не обладающих необходимым запасом устойчивости, не удовлетворяет ни одну реальную систему, так как любое изменение переменных, даже незначительное, может вывести систему из устойчивого режима. В связи с этим необходимо количественно оценить запас устойчивости. Наиболее распространенными оценками последнего являются следующие оценки.
7.3.1 Корневые методы оценки запаса устойчивости
Как известно, границей устойчивости в плоскости корней характеристического уравнения является мнимая ось, поэтому, чем ближе корни характеристического уравнения располагаются к мнимой оси, тем ближе система находится к границе
156
устойчивости. Следовательно, оценить запас устойчивости можно по расположению корней характеристического уравнения. Такой оценкой является степень устойчивости р, которая определяется расстоянием до мнимой оси ближайшего корня (рис. 7.5, а).
 |
|
Рис. 7.5 Корневые показатели оценки запаса устойчивости: а - степень устойчивости; б - степень колебательности; в - одновременное использование степени устойчивости и степени колебательности |
Другим показателем этой группы является степень колебательности т - модуль минимального отношения действительной и мнимой частей корня Sj характеристического уравнения по сравнению с другими корнями (рис. 7.5, б):
С геометрической точки зрения степень колебательности является тангенсом угла, заключенного между лучами ОА или ОВ, проведенными через начало координат и наиболее удаленные корни и мнимой осью, т.е. tg ф = т или ф = arctg т. Корни, находящиеся на этих лучах, расположены таким образом, что все остальные корни, лежат слева от них (в секторе АОВ).
Для обеспечения запаса устойчивости необходимо, чтобы степень колебательности в системе была больше или равна заданной т > тзад, а область заданного запаса устойчивости в этом случае определится сектором АОВ (рис.7.5, б).
В ряде случаев для оценки запаса устойчивости можно использовать одновременно оба рассмотренных показателя - степень устойчивости и степень колебательности. В этом случае область обеспечения заданного запаса устойчивости определяется областью ABCD (рис. 7.5,
в).
7.3.2 Частотные методы
Среди частотных методов оценки запаса устойчивости прежде всего выделяются методы, связанные с амплитудно-фазовой характеристикой разомкнутой системы, это запас устойчивости по модулю и запас устойчивости по фазе.
Запас устойчивости по модулю определяется как длина отрезка G, равного расстоянию от точки пересечения АФХ разомкнутой системы с отрицательной вещественной полуосью до точки (-1, L0) (рис. 7.6, а).
Численно запас устойчивости по модулю показывает, на сколько должен измениться модуль АФХ разомкнутой системы, чтобы система вышла на границу устойчивости.
Запас устойчивости по фазе - это угол у, лежащий между вещественной отрицательной полуосью и лучом, проведенным из начала координат в точку пересечения АФХ с единичной окружностью с центром в начале координат (рис.7.6, б).
Численно запас устойчивости по фазе показывает, на сколько должно увеличиться отставание по фазе в разомкнутой системе при неизменном модуле АФХ, чтобы система вышла на границу устойчивости. Как правило, эти показатели используют вместе.
Для работоспособности системы требуется, чтобы запасы устойчивости по модулю и фазе были не меньше некоторых заданных величин: G > й?зад; у > узад.
Одним из основных частотных методов оценки запаса устойчивости является показателъ колебательности, который как бы объединяет запас устойчивости по модулю и запас устойчивости по фазе. Оказывается, что степень близости замкнутой системы к границе устойчивости можно определить по величине максимума амплитудно-частотной характеристики разомкнутой системы. Этот максимум и называется показателем колебательности М, если F(0) = 1 (рис. 7.7).
 |
| а - запас устойчивости по модулю; б - запас устойчивости по фазе |
 |
|
Рис. 7.7 АЧХ замкнутой системы: 1 - неколебательной; 2 - колебательной; 3 - на границе устойчивости |
откуда АЧХ замкнутой системы, соответственно, равна
Анализ АФХ разомкнутой системы показывает, что, как видно из рис. 7.8, ее модуль равен длине отрезка ОВ, т.е. | Wp.c(iZ) \ = ОВ.
Вектор 1 + Wp.c(iz) определяется как разность векторов ОА и ОВ, т.е.
 |
| Рис. 7.8 Определение показателя колебательности |
Если изменять частоту от 0 до f, то
отношение
вначале возрастает, а затем начинает
уменьшаться, следовательно, и АЧХ замкнутой системы вначале будет возрастать, а затем уменьшаться, т.е. будет иметь максимум. Для того, чтобы этот максимум имел заданную величину, а, следовательно, был задан показатель колебательности, необходимо, чтобы геометрически на плоскости АФХ разомкнутой системы отношение отрезков ОВ и АВ имело постоянную величину (рис. 7.8):
(7.9)
I I = М = соші
Если задан показатель колебательности, то задан запас устойчивости (максимум АЧХ замкнутой системы не должен превышать некоторой заранее заданной величины), выражающийся геометрически в задании на плоскости АФХ разомкнутой системы окружности
радиусом
с центром на отрицательной вещественной полуоси на расстоянии

, которую не должна пересекать амплитудно-фазовая характеристика разомкнутой
системы (рис. 7.9).
7.4 АНАЛИЗ СИСТЕМ НА ЗАПАС УСТОЙЧИВОСТИ
7.4.1 Расширенные частотные характеристики
Как известно, амплитудно-фазовая характеристика является конформным отображением мнимой оси плоскости корней характеристического уравнения на плоскость АФХ, механизмом ее получения явля
 |
| Рис. 7.9 Круговая диаграмма |
 |
|
Рис. 7.10 Расширенная частотная характеристика по степени устойчивости: а - плоскость корней характеристического уравнения; б - частотные характеристики |
Если запас устойчивости характеризуется степенью устойчивости, то в этом случае граница устойчивости как бы сдвигается влево на величину рзад (рис. 7.10, а).
Отображение новой границы устойчивости, характеризующейся заданной степенью устойчивости, на плоскость АФХ даст некоторый годограф, который получил название расширенной амплитудно-фазовой характеристики. В плоскости корней характеристического уравнения любая точка на прямой заданной степени устойчивости определяется как ?= -"Лзад + iz. Следовательно, для получения расширенной частотной характеристики необходимо в передаточной функции комплексный параметр ? заменить на (-рзад + Lz). Г одограф расширенной амплитудно-фазовой характеристики (РАФХ) W( - рзад + Lz) по сравнению с обычной АФХ стал как бы шире ("распух") (рис. 7.10, б), в связи с чем эта характеристика и получила название расширенная. Согласно свойствам конформного отображения при z = 0 эта РАФХ выходит под углом 90° к действительной полуоси.
Следующая расширенная частотная характеристика характеризуется заданной степенью колебательности. В этом случае граница устойчивости определяется лучами АОВ (рис. 7.11, а).
Отображение этой границы на плоскости АФХ и дает годограф расширенной амплитудно-фазовой характеристики по степени колебательности m.
На лучах АОВ параметр ? имеет координаты (-a, iz), которые связаны соотношением а = mz, тогда ? = -а + iz = -mz+iz, следовательно, для по-

по степени колебательности:
а - плоскость корней характеристического уравнения; б - частотные характеристики
лучения РАФХ достаточно в передаточной функции комплексный параметр ? заменить на (-mz + iz). Годограф рассматриваемой РАФХ - W(-mz + iz) на плоскости АФХ шире, чем годограф
 | (рис. 7.11, б). |
Расширенные амплитудно-фазовые характеристики могут быть записаны через расширенные амплитудно- и фазочастотные характеристики:
W(-k + iz) = М(ц, z)e-iM(K’z); W(-mz + iz) = M(m, z)e-iM(m’z\ (7.10) Пример 7.1 Построить расширенные частотные характеристики, если
а) Производя замену ? = - mz + iz, имеем АФХ:
АЧХ:
ФЧХ:

График частотных характеристик изображен на рис. 7.12.
 |
|
Рис. 7.12 Расширенные частотные характеристики: а - АЧХ; [ - ФЧХ; в - АФХ |
б) Производя замену ? = -р + ію, имеем
 |
|
Рис. 7.13 Расширенные частотные характеристики: а - АЧХ; [ - ФЧХ; в - АФХ |
Для анализа систем на запас устойчивости используется аналог критерия Найквиста.
Согласно критерию Найквиста замкнутая система находится на границе устойчивости, если АФХ разомкнутой системы проходит через точку (-1, L0). Применяя этот критерий для исследования системы на запас устойчивости, следует, что если разомкнутая система обладает запасом устойчивости и расширенная амплитудно-фазовая характеристика не охватывает точку (-1, L0), то замкнутая система имеет запас устойчивости не меньше, чем заданный.
Если запас устойчивости оценивается степенью устойчивости р, то для анализа системы аналог критерия Найквиста может быть использован в следующей формулировке. Если
162
разомкнутая система имеет степень устойчивости рзад, то замкнутая система будет обладать заданной степенью устойчивости, если РАФХ разомкнутой системы W(-p, Lz) проходит через точку (-1, L0). Если РАФХ разомкнутой системы W (-р, iZ) не охватывает точку (-1, L0), то степень устойчивости замкнутой системы будет выше заданной рзад.
Условие, согласно которому замкнутая система будет обладать заданной степенью колебательности т, формулируется следующим образом. Если разомкнутая система имеет степень колебательности тзад, то замкнутая система будет обладать заданной степенью колебательности, если РАФХ разомкнутой системы W(-pz + iZ) проходит через точку (-1, L0). Если РАФХ разомкнутой системы W(-mz + iZ) не охватывает точку (-1, L0), то степень
колебательности замкнутой системы будет выше тзад.
При анализе системы на запас устойчивости по модулю и по фазе необходимо построить АФХ замкнутой системы и определить исследуемые запасы устойчивости графически, согласно их определению.
с центром в точке
При оценке запаса устойчивости по показателю колебательности М строится АФХ разомкнутой системы и окружность (рис. 7.9) радиуса
. Замкнутая система обладает запасом устойчивости выше заданного, если АФХ
разомкнутой системы не заходит внутрь этой окружности. Если АФХ касается этой окружности, то замкнутая система обладает заданным запасом устойчивости.
7.5 СИНТЕЗ СИСТЕМ, ОБЛАДАЮЩИХ ЗАДАННЫМ ЗАПАСОМ УСТОЙЧИВОСТИ
В п. 7.2 был рассмотрен синтез устойчивых систем. Теперь необходимо провести синтез систем, обладающих заданным запасом устойчивости, например, заданной степенью колебательности тзад. Под синтезом в данном случае будем понимать расчет настроек регуляторов в замкнутой одноконтурной системе регулирования.
Как известно, для того, чтобы замкнутая система обладала заданным запасом устойчивости - заданной степенью колебательности, необходимо и достаточно, чтобы РАФХ разомкнутой системы W(-mZ + Lz) проходила через точку (-1, L0). На основании этого можно записать
Wоб(-mzр + LZp) Wp(-mZp + LZp ) = -1. (7.11)
Уравнение (7.11) можно свести к системе двух уравнений, отражающих связь между частотными характеристиками объекта и регулятора:
Г 0об(р, Юр)+рк &р, So, Su S2) =1; (7 12)
[фоб (т, ЮР ) Фр (т, Юр, S0, S1, S2 ) = ^,
где S0, S1, S2 - параметры настроек регуляторов. Система уравнений (7.12) позволяет определить рабочую частоту и параметры настроек регуляторов, эта система может быть записана также в виде: _0
7.5.1 Система с П-регуляторомРасширенная амплитудно-фазовая характеристика П-регулятора записывается в виде: Wp(-mz + iz) = -S1 = S1e-lK , тогда система уравнений (7.12) для системы автоматического регулирования с П-регулятором преобразуется к виду:

(7.13)
 |
| Рис. 7.14 Определение настройки П-регулятора, обеспечивающей |
а - определение рабочей частоты Юр; б - определение значения РАЧХ объекта при рабочей частоте юр
Из второго уравнения системы определяется рабочая частота юр . Последнюю можно определить и графически, для чего следует построить расширенную фазочастотную характеристику объекта и прямую, равную -к (рис. 7.14, а), пересечение которых и дает юр. Настройка П-регулятора определится по соотношению

(7.14)
где значение расширенной АЧХ объекта можно определить как аналитически, так и графически (рис. 7.14, б).
7.5.2 Система с И-регулятором
Расширенная амплитудно-фазовая характеристика И-регулятора имеет вид
Л]
С учетом этой характеристики система уравнений (7.12) для определения настройки So и рабочей частоты записывается в виде:
 |
|
Рис. 7.15 Определение настройки И-регулятора, обеспечивающей заданную степень колебательности: а - определение рабочей частоты юр; [ - определение значения РАЧХ объекта при рабочей частоте юр Решение системы уравнений (7.15) может быть проведено как аналитически, так и графически. Графическое решение второго уравнения с целью определения рабочей частоты представлено на рис. 7.15, а. На рис. 7.15, [ представлено определение значения РАЧХ объекта при рабочей частоте. Настройка So И-регулятора, обеспечивающая заданную степень колебательности, определяется соотношением_ |
Расширенная амплитудно-фазовая характеристика ПИ-регулятора:


откуда для регулятора РАЧХ -
РФЧХ -
ПИ-регулятор имеет два параметра настроек So и S1, которые вместе с юр подлежат расчету. Система уравнений (7.12) записывается в виде:
 | (7.17) |
Для получения этих решений система разрешается относительно значений настроек:
(7.19)
| M* (m, Юр) |  | (m, ю ) |



для двух значений постоянной времени Гіі (сплошная), Гц (пун-ктирная), Гц > Гц. Как видно из графиков, увеличение постоянной времени ведет к увеличению запаса
располагается левее
устойчивости по фазе от у до уі, если сопрягающая частота юі
частоты среза юс. Если же сопрягающая частота расположится правее частоты среза, то увеличение постоянной времени апериодического звена уменьшит запас устойчивости.
Это правило справедливо для апериодических, колебательных звеньев. Для форсирующего звена влияние постоянной времени противоположно, а для ряда структур, имеющих передаточную функцию разомкнутой системы, например,
0 , оно не выполняется, т.е. с увеличением Т1 запас по фазе
уменьшается.
Другим наиболее распространенным путем обеспечения устойчивости и запаса устойчивости АСР является введение в ее прямую цепь дополнительных звеньев, причем введение одного и того же звена в зависимости от структуры и параметров системы дает различные результаты. Поэтому правильный выбор дополнительного звена можно сделать, если известна структура и параметры системы.
7.7 СТРУКТУРНАЯ НЕУСТОЙЧИВОСТЬ
Структурно-устойчивыми называются системы, которые при каких-либо значениях их параметров могут стать устойчивыми. Структурно-неустойчивыми называются системы, которые не могут стать устойчивыми ни при каких комбинациях значений их параметров.
Вопросы структурной устойчивости возникают при введении дополнительных звеньев, т.е. получаемая система должна быть, в первую очередь, структурно-устойчивой. В ряде случаев по виду структурной схемы можно определить, является система структурноустойчивой или структурно-неустойчивой.
Система является структурно-устойчивой, если в ее состав входят только устойчивые инерционные и колебательные звенья. Хорошей геометрической интерпретацией является рассмотрение годографа Михайлова.
Пусть система состоит из одного интегрирующего и устойчивых инерционных и колебательных звеньев. В этом случае годограф Михайлова имеет вид, изображенный на рис. 7.19, а. Анализ этого годографа показывает, что при достаточно малых возмущениях весь годограф сдвигается немного вправо и система становится устойчивой, следовательно, система с одним интегрирующим звеном структурно-устойчива.
Система, состоящая из двух интегрирующих звеньев и любого числа устойчивых инерционных и колебательных звеньев, структурно-неустойчива. Годограф Михайлова этой системы изображен на рис. 7.20, [, из которого видно, что никакими возмущениями не удастся сдвинуть годограф вправо таким образом, чтобы система стала устойчивой.
Рис. 7.19 Годографы Михайлова с целью определения структурной устойчивости
системы, состоящей из устойчивых инерционных, колебательных звеньев:
а - одного интегрирующего звена; [ - двух интегрирующих звеньев
7.8 ВЛИЯНИЕ МАЛЫХ ПАРАМЕТРОВ
НА УСТОЙЧИВОСТЬ
При разработке математического описания системы нередко вносятся те или иные допущения, заключающиеся в пренебрежении малыми параметрами системы. Последнее ведет к понижению порядка дифференциальных уравнений и об устойчивости судят по приближенным "вырожденным" уравнениям чисто интуитивным путем. Однако для конкретных случаев можно оценить влияние малых параметров на устойчивость.
Пусть малый параметр р входит линейно в характеристическое уравнение системы, т.е. это уравнение записывается следующим образом
D(v) = pDi (v) + 'оО) = 0, (7.20)
где р - малый параметр; D0(v) - полином порядка п; D\(s) - полином порядка 1 = т + п.
Здесь возможны три характерных случая:
1 Порядок числителя функции 0 на единицу выше порядка знаменателя, т = 1. В


и при р > 0,
этом случае один из корней характеристического уравнения ?
уходит в бесконечность по отрицательной вещественной оси. При достаточно малых значениях р система будет устойчивой, если корни вырожденного уравнения D0(v) = 0 -левые.
| Порядок числителя функции |  |
на два порядка выше порядка знаменателя, т
В этом случае условием устойчивости системы является устойчивость решения вырожденного уравнения D0(v) = 0 и выполнение неравенства
3 Разность порядков числителя и знаменателя т > 2. В этом случае отбрасывать малые параметры при исследовании устойчивости недопустимо.
Встречаются случаи, когда малый параметр входит в уравнение системы в виде полинома. Устойчивость такой системы определяется тем, как располагаются уходящие в бесконечность корни: справа или слева от мнимой оси. Расположение этих корней определяется, так называемым, вспомогательным уравнением. Для того, чтобы исходная система при достаточно малых р была устойчивой, необходимо и достаточно, чтобы вырожденное и вспомогательное уравнения, каждое порознь, удовлетворяли условиям устойчивости.
7.9 КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА
Как уже неоднократно говорилось, одним из приемов обеспечения устойчивости и запаса устойчивости системы является введение в нее дополнительного элемента, который исправляет, корректирует свойства исходной системы, и называется корректирующим элементом.
Если этот элемент достаточно сложен, то он называется корректирующим устройством. Таким образом, корректирующее устройство - это функциональный элемент системы автоматического регулирования по отклонению, обеспечивающий необходимые динамические свойства этой системы. Включаются эти элементы в систему различным образом.
7.9.1 Последовательная коррекция
Корректирующее устройство включается в прямую цепь системы обычно после датчика или же предварительного усилителя. На рис. 7.20 изображена структурная схема системы автоматического регулирования с последовательным корректирующим устройством WK(s).
Применение последовательных корректирующих устройств наиболее удобно в системах,
у которых сигнал управления представляет собой напряжение постоянного тока.
В качестве корректирующих устройств могут быть выбраны следующие:
- идеальное дифференцирующее звено
(7.21)
ВД = Тд v;
- идеальное дифференцирующее звено с совместным введением производной и отклонения.
(7.22)
Гк(?) = кк(Тд v + 1);
- инерционные дифференцирующие звенья

(7.23)
- идеальное интегрирующее звено
(7.24)
- инерционное интегрирующее звено

(7.25)
Рис. 7.20 Структурная схема системы с последовательной коррекцией
Использование корректирующего элемента с передаточной функцией (7.21) ведет к потере информации о величине отклонения регулируемой величины. В этом случае необходимо учитывать как само отклонение, так и его производную, т.е. корректирующее устройство должно выбираться в виде (7.22). Однако передаточная функция корректирующего устройства должна выбираться в виде (7.23).
Использование интегрирующих звеньев (7.24), (7.25) повышает порядок астатизма системы, что ведет к ухудшению устойчивости, поэтому одновременно необходимо позаботиться о дополнительных средствах коррекции с целью повышения устойчивости. Введение производных является одним из способов такой коррекции.
7.9.2 Параллельная коррекция
При параллельной коррекции корректирующее устройство подключается параллельно одному или нескольким основным звеньям (рис. 7.21), при этом возможна коррекция двух видов: упреждающая или прямая связь (рис. 7.21, а) и обратная связь (рис. 7.21, б). В замкнутой системе разница между этими видами параллельной коррекции становится условной и сводится лишь к тому, какие звенья считаются "охваченными" данной связью. Однако на практике чаще всего используют отрицательную обратную связь.
В зависимости от типа корректирующего устройства различают следующие типы обратных связей:
- жесткая обратная связь
:к(?) = кк = соші;, (7.26)
где к - коэффициент жесткой обратной связи;
- инерционная жесткая обратная связь
(7.27)
 |
|
Рис. 7.22 Структурная схема параллельной коррекции: а - прямая связь; б - обратная связь |
(7.28)
:кз(?) = Т>;
- инерционная гибкая обратная связь (изодромная)
; (7.29)
- инерционная корректирующая обратная связь (астатическая коррекция)
Гкз(?) = Q (7.30)
- комбинированная обратная связь (изодромная с остаточной неравномерностью)
(7.31)
Анализ применения различных корректирующих устройств позволяет сделать некоторые выводы и рекомендации относительно их использования. Положительная жесткая обратная связь (7.26) служит для увеличения коэффициента усиления, но при этом необходимо следить за постоянной времени, которая также увеличивается, и система может стать неустойчивой. Отрицательная жесткая обратная связь (7.26) используется для уменьшения инерционности системы. Так как положительные обратные связи влекут за собой потерю устойчивости, то в дальнейшем без специальных оговорок будет считаться, что обратная связь - отрицательна. Жесткие обратные связи аннулируют интегрирующие свойства, а гибкие связи сохраняют астатизм. Охват жесткой обратной связью превращает астатические связи в статические. В практическом применении наибольшее распространение получила инерционная гибкая обратная связь.
7.10 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 На устойчивость систем автоматического управления оказывают влияние параметры регулируемого объекта. Достижение устойчивости можно осуществить выбором соответствующих элементов системы регулирования, в частности, выбором настроек регуляторов. Таким образом, синтез устойчивых систем сводится к определению настроек регуляторов, при которых система будет находиться на границе устойчивости.
А На каком критерии базируется синтез устойчивых систем"
В Каким образом строится граница устойчивости для систем регулирования с регулятором, имеющим два настроечных параметра?
С Как синтезировать устойчивую систему с П- или И-регулятором?
2 Система автоматического управления не только должна быть устойчивой, но и
обладать некоторым запасом устойчивости. Последний можно оценить с помощью корневых и частотных методов.
А Какие корневые методы оценки запаса устойчивости вам известны?
В Какой физический смысл имеет показатель колебательности?
С С помощью каких частотных характеристик вводятся в рассмотрение оценки запаса устойчивости?
3 Для анализа систем на запас устойчивости используется аналог критерия Найквиста, на котором основан и синтез систем, обладающих запасом устойчивости. При этом, как и при синтезе устойчивых систем, необходимо определить настройки регуляторов, при которых система обладает заданным запасом устойчивости.
А Если запас устойчивости оценивается показателем колебательности, то как оценить запас устойчивости замкнутой системы?
В Однозначно или нет решается задача определения настроек ПИ- и ПД-регуляторов на заданный запас устойчивости?
С Что означает термин "структурная неустойчивость"?
7.11 ТЕСТ
1 Предельное значение настроек П-регулятора, при котором система находится на границе устойчивости определяется по соотношению:

2 Как определить степень устойчивости?

3 Как получить расширенную амплитудно-фазовую характеристику?
: Заменой в передаточной функции S = L ю.
В Заменой в передаточной функции S = L ю + М ю.
С Заменой в передаточной функции S = -т ю + L ю.
4 Какой показатель определяет запас устойчивости?
: Степень затухания.
В Показатель колебательности.
С Время регулирования.
5 Каким показателем определяется запас устойчивости при расчете настроечных параметров методом РАФХ?
: Запас устойчивости на фазе.
В Показатель колебательности.
С Степень колебательности.
6 При расчете регуляторов на заданный запас устойчивости их настройки выбираются...
: Вне кривой заданного запаса устойчивости.
В На кривой заданного запаса устойчивости.
С Внутри области, ограниченной кривой заданного запаса устойчивости.
7 Для систем регулирования с ПИ-регулятором граница заданного запаса устойчивости строится в координатах.
: Si - So.
В Re(rn, ю) - Im(rn, ю).
С 5е(ю) - Іт(ю).
8 Какие частотные характеристики используются при анализе систем регулирования на запас устойчивости по модулю и фазе?
: АФХ объекта и АФХ регулятора.
В АФХ разомкнутой системы.
С АФХ замкнутой системы.
9 Граница заданного запаса устойчивости определяется по уравнению.
: :об( тюр, /*юр) Гоб( тюр, S0, Si) 1.
В ГобОЧ) Гоб(/юр, S0, S1) 1.
С :об( тюр, ^*юр) :об( тюр, ^^р? S0, S1).
10 При синтезе систем на заданный запас устойчивости рабочая частота - это .
: Частота, при которой система находится на границе устойчивости.
В Частота, при которой система находится на границе заданного запаса устойчивости.
С Частота, при которой система находится в области неустойчивой работы.
8 ИССЛЕДОВАНИЕ КА ЧЕСТВА ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
Одной из проблем, возникающих при построении систем автоматического регулирования, наряду с проблемой устойчивости, является качество регулирования, характеризующее точность и плавность протекания переходного процесса.
Система автоматического регулирования называется качественной, если она удовлетворяет определенным технологическим требованиям: например, как будет меняться реакция системы, если на ее вход действуют различного рода возмущения как по каналу управления, так и по каналу возмущения, т.е. обеспечивается ли принципиальная возможность прихода системы в некоторое установившееся состояние. Такое понятие качества автоматической системы охватывает ее статические и динамические свойства, выраженные в количественной форме и получившие название показателей качества управления.
8.1 ПОКАЗАТЕЛИ КАЧЕСТВА
8.1.1 Прямые показатели
Наиболее распространенными прямыми показателями или критериями качества, применяемыми в системах управления, являются:
1 Статическая ошибка регулирования \ст, определяемая как разность между установившимся значением регулируемой переменной и ее заданным значением (рис. 8.1),
т-е- \ст _ \уст — \зад.
2 Динамическая ошибка регулирования \дин, определяемая как наибольшее отклонение в переходном процессе регулируемой пере-менной от ее установившегося значения (рис. 8.2).
3 Время регулирования Тр - время, за которое разность между текущим значением регулируемой переменной и ее заданным значением (или установившимся) становится меньше s
(рис. 8.1, 8.2), [\зад(0 -\(t)\ < s.

4 Перерегулирование а, измеряемое в % и равное отношению первого максимального отклонения регулируемой переменной от ее установившегося значения к этому установившемуся значению (рис. 8.3):

(8.1)
Качество регулирования считается удовлетворительным, если перерегулирование не превышает 30 - 40 %.
5 Степень затухания измеряемая в %, служит количественной оценкой интенсивности затухания колебательных процессов и определяется как отношение разности первой и третьей амплитуд к первой амплитуде (рис. 8.4):

(8.2)
Интенсивность затухания колебаний в системе считается удовлетворительной, если степень затухания составляет 75 % и выше, в некоторых случаях допускается порядка 60 %.
Для того, чтобы система автоматического регулирования удовлетворяла требуемому качеству необходимо, чтобы прямые показатели качества регулирования этой системы были меньше или равны заданным, т.е._
0 •
Иногда требования по качеству регулирования могут быть более жесткие, например, переходный процесс должен быть монотонным или монотонным и без перегибов.Прямые показатели качества удобно использовать в тех случаях, когда имеется график переходного процесса \(W), который может быть получен экспериментально в реальной системе регулирования или путем моделирования на ЭВМ. Если же такой возможности нет, т.е. не удается никаким образом получить кривую переходного процесса, то пользуются косвенными показателями качества, которые вычисляются без построения графика переходного процесса по коэффициентам урав-нений или по частотным характеристикам.
8.1.2 Косвенные показатели качества
Основную группу среди косвенных показателей качества составляют корневые показатели качества регулирования, к которым относятся степень устойчивости и степень колебательности. Эти показатели уже были использованы для определения оценки запаса устойчивости (п. 7.3, где было дано их определение). С точки зрения качества регулирования можно сделать следующие выводы.
1 Степень устойчивости, определяемая по формуле (7.7), характеризует интенсивность затухания наиболее медленно затухающей неколебательной составляющей переходного процесса, которая определяется как \к(Д = Ске~ц1. Пусть рассматриваемая система описывается дифференциальным уравнением второго порядка, характеристическое уравнение которого имеет два действительных различных корня ?1 = - а1, ?2 = - а2 и а1
< а2 (рис. 8.5, а). Последним соответствуют две элементарные составляющие свободного движения системы (рис. 8.5, [):
Как видно из графиков переходных процессов, чем меньше абсолютное значение корня характеристического уравнения, тем медленнее затухает соответствующая ему составляющая. Результирующий переходный процесс y(t) = 6yL(t). Его затухание
определяется наиболее медленно затухающей составляющей, т.е. наименьшим по абсолютному значению корнем характеристического уравнения.
 |
|
Рис. 8.5 Определение качества монотонных переходных процессов по степени устойчивости: а - расположение корней характеристического уравнения; [ - составляющие переходного процесса |
 |
|
Рис. 8.6 Определение качества колебательных переходных процессов по степени устойчивости: а - расположение корней характеристического уравнения; |
Если же характеристическое уравнение системы имеет комплексные сопряженные корни, то составляющая переходного процесса yL(t) будет иметь колебательный характер yL(t) = CLe"ntcosrot, и действительная часть корня, а фактически степень устойчивости, так как к = а, характеризует огибающую (рис. 8.6).
Как видно из рис. 8.6, два колебательных переходных процесса разной частоты имеют одинаковые огибающие, т.е. \огиб = e-Kt. Но при одинаковой степени устойчивости качество этих переходных процессов существенно отличается друг от друга. Следовательно, знания степени устойчивости для оценки качества колебательных переходных процессов недостаточно.
Степень устойчивости может быть использована для оценки времени регулирования монотонных переходных процессов. Касательная к = e-Kt в точке t = 0 отсекает на оси
абсцисс отрезок
(рис. 8.5, б). Время регулирования в этом случае определяется как
7 < 7р <
(8.3)
Если требуется уменьшить время регулирования, то, как следует из (8.3), степень устойчивости надо увеличивать. При оценке времени регулирования частота не учитывается.
2 Степень колебательности так же, как и степень устойчивости, используется и для оценки запаса устойчивости и для оценки качества регулирования. Степень колебательности, определяемая в соответствии с (7.8), характеризует затухание наиболее медленно затухающей составляющей, которая определяется как \(t) = Ae^niZtsinzt, откуда следует, что изменение частоты влечет и изменение амплитуды колебаний.
. В этом случае степень затухания,
Степень колебательности однозначно связана со степенью затухания. Действительно, в момент времени t0 амплитуда свободной составляющей определяется как уі= момент времени t0 + L, т.е. через период, \3 = согласно (8.2), запишется:

то
так как
-2пт
(8.4)
Степень затухания изменяется от 0 до і, а степень колебательности - от 0 до f. Наиболее часто используются следующие их значения: т = 0,141 (% = 0,61); т = 0,221 (% = 0,75); т = 0,366 (% = 0,9); т = 0,478 (% = 0,95).
3 Оценка статической ошибки может быть получена по предельной теореме:
(8.5)
\ст
где :з.с(?) - передаточная функция замкнутой системы по каналу ошибки; ;(?) -изображение задающего воздействия, в большинстве случаев x(t) = С = const и тогда ;(?) =
I. С учетом вышесказанного
\ст
Например, для систем с интегральным регулятором статическая ошибка отсутствует
а для систем с пропорциональным регулятором равна
ЛІ
Если в Гоб(?) коэффициент передачи равен к, то .
Из последнего соотношения видно, что в системах с П-регулятором статическая ошибка уменьшается с увеличением значения параметра настройки регулятора. В реальных системах берется максимально возможное значение Sі, исходя из обеспечения запаса устойчивости.
В заключение следует заметить, что динамическая ошибка корневыми методами не оценивается.
8.1.3 Интегральные критерии качества
Интегральные критерии качества представляют собой определенные интегралы по времени в пределах от 0 до ' от некоторой функции переходного процесса \(t) или ошибки s(t) и вычисляются непосредственно, либо по переходным функциям системы, или по коэффициентам передаточной функции системы. Целью использования этих критериев является получение общей оценки быстродействия и отклонения регулируемой величины от установившегося значения. К интегральным критериям качества предъявляются два требования: а) простота вычисления интеграла; б) несложность выражения через коэффициенты дифференциального уравнения.
8.1.3.1 Линейный интегральный критерий
(8.6)
служит для оценки качества неколебательных процессов. Геометрически этот критерий характеризует площадь, заключенную между кривой переходного процесса и осью абсцисс (рис. 8.7, а), он учитывает как время регулирования, так и величину динамических отклонений. Если неизвестна кривая переходного процесса, но известна передаточная функция замкнутой системы :з.с(?) и входная переменная x(t) = 1(t), то значение линейного интегрального критерия определяется с использованием теоремы о конечном значении функции. Действительно, формулу (8.6) можно записать иначе:
0
и тогда _1
Линейный интегральный критерий качества можно вычислить и другими методами. Например, если даны дифференциальное уравнение и начальные условия:
+ ап.іу '"-1|(W) + ... +a0y(W) = 0, \'H’ "(0), ....\'(0), v(0),
то, проинтегрировав его, получим
Для устойчивых систем у(г)(<х>) = 0 для L = 1, 2, ".
Тогда - а"У(п- 1)(0) - D" . 1 у(" ' 2)(0) - ... - а^Д = 0, откуда
Л]
-л
а при нулевых начальных условиях
| -л |  |
ЛІ
Выведем формулу, позволяющую вычислять такой критерий. Для этого
продифференцируем по ? функцию
ЛІ
осуществляющую преобразование по Лапласу функции y(W):
Если перейти к пределу 0
0, то получим
при ?
Следует отметить, что для вычисления таких критериев не требуется знание переходного процесса. Чем меньше значение линейного интегрального критерия, тем лучше качество процесса регулирования. Однако использование данного типа критериев для знакопеременных переходных процессов не дает объективной картины, так, например, для незатухающей синусоиды —л = 0. Поэтому для оценки качества регулирования таких процессов используют ин-тегральные оценки, знакопеременность подынтегральной функции которых устранена каким-либо способом.
Пример 8.1
Требуется вычислить —л* для системы с
Решение. _
Найдем \(s):
Рис. 8.7 Интегральные оценки качества регулирования:
а - линейная; б - модульная; в - квадратичная
8.1.3.2 Модульный интегральный критерий

(8.7)
применяется для оценки качества колебательных процессов, а для неколебательных процессов он совпадает с линейным интегральным критерием. Для его вычисления требуется знание переходного процесса. На практике этот критерий используется при численном исследовании систем на моделях с применением вычислительной техники, т.е. там, где операция взятия модуля не представляет трудности. Геометрически критерий равен площади, заключенной между кривой |\(W)| и осью абсцисс (рис. 8.7, б). В некоторых случаях используют модификацию мрлульного интегрального критерия:
(8.8)
которая придает больший вес значениям переходного процесса в его конце.
8.1.3.3 Интегральный квадратичный критерий
, (8.9)
является наиболее распространенным критерием качества и представляет собой площадь под кривой \2(W) (рис. 8.7, в). Как видно из (8.9), разные по величине ординаты переходного процесса входят в критерий с разным весом, что приводит к тому, что начальный участок переходного процесса приобретает наибольшее значение, чем его "хвост", который практически не влияет на квадратичный критерий. Стремясь минимизировать (8.9), фактически минимизируют наибольшие отклонения регулируемой величины, поэтому минимальные значения критерия всегда соответствуют колебательным процессам с малым затуханием. С целью устранения этого недостатка применяют улучшенную квадратичную оценку:
(8.10)
которая, кроме самих отклонений, учитывает с весовым коэффициентом их производную. Весовой коэффициент выбирается равным желаемому времени нарастания или применяется в пределах
(8.11)
где Тр - желаемая длительность переходного процесса.
Квадратичный критерий, как и линейный, можно вычислить без построения переходного процесса по частотной характеристике замкнутой системы и преобразованию по Фурье от входного сигнала.
Используя формулу Релея, получают:_
0
В заключение следует отметить, что абсолютные значения любой интегральной оценки сами по себе не представляют интереса. Они служат для сопоставления различных вариантов настройки одной и той же системы, а также для определения параметров настройки системы.8.2 ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА КА ЧЕСТВА РЕГУЛИРОВАНИЯ
В инженерной практике широко используются частотные методы исследования систем управления. В частности, группа методов, разработанная В. В. Солодовниковым, позволяет оценить качество регулирования по вещественным частотным характеристикам, построить переходные процессы, а также синтезировать корректирующие устройства.
8.2.1 Зависимость между переходной и частотными характеристиками
Для оценки качества регулирования необходимо установить связь между переходный и частотными характеристиками. В частотной области переходная характеристика записывается через преобразование Фурье:
(8.12, а)
и через АФХ системы и изображение входной переменной по Фурье с другой стороны
\(lZ) = W(iz) X(iZ). (8.12, [)
Используя обратное преобразование Фурье и последние соотношения, переходной процесс (переходная характеристика) определяется следующим образом:
(8.13)
При воздействии на вход единичной ступенчатой функцией x(t) = 1 (t), изображение
которой x(iZ) = 1 /(iZ), соотношение (8.13) для переходной функции запишется как
Представляя АФХ через действительную и мнимую часть W(iz) = Re(ro) + iIm(ro) и
разлагая еш по формуле Эйлера, выражение для переходной функции преобразуется к более удобному виду с использованием ВЧХ - Re(ro): _
. (8.14)
или МЧХ - Im(ro):
На практике используется формула (8.14), в которой ВЧХ представляет собой сложную функцию и интегрирование возможно только приближенно: численными методами с применением ЭВМ либо путем предварительной аппроксимации сложной характеристики Re(ro) кусочно-линейными функциями - суммой трапеций или суммой треугольников, что позволяет получить достаточно удобные выражения.
Если на систему действует произвольное возмущение, то переходный процесс определяется по обобщенным вещественной и мнимой характеристикам:
5еоб(ю) = Re[ W(lZ)X(lZ)\, Ітоб(ю) = Im[ W(lZ)X(lZ)\, (8.16)
при этом необходимо, чтобы полюсы функции W(s)X(s) располагались слева от мнимой оси.
8.2.2 Свойства вещественно-частотных характеристик и соответствующих им переходных процессов
Основные свойства ВЧХ и переходных процессов следуют из (8.14). 1 Свойство линейности: если ВЧХ можно представить суммой

(8.17, а)
и каждой составляющей соответствует переходный процесс

(8.17, б)
то и переходный процесс y(t) может быть представлен суммой составляющих

(8.17, в)
 |
|
Рис. 8.8 Соответствие масштабов по оси ординат: а -ВЧХ; б - переходные процессы |
Если умножить Яе(ю) на постоянный множитель а, то соответствующее значение y(t) тоже умножается на этот множитель а (рис. 8.8).
3 Соответствие масштабов по оси абсцисс для Re(a>) и у(Х).
Если аргумент z в соответствующем выражении частотной характеристики умножить на постоянное число, то аргумент в соответствующем выражении переходного процесса будет делиться на это число (рис. 8.9), т.е.
(8.18)

а - ВЧХ; б - переходные процессы
4 Начальное значение ВЧХ равно конечному значению переходной характеристики (рис. 8.9)
(8.19)
Начальное значение МЧХ Іт(0) = 0.
5 Конечное значение ВЧХравно начальному значению переходной характеристики
(8.20)
Интерес представляют разрывы непрерывности и пики в ве-щественно-частотной характеристике.
Пусть при ю = ю1 ВЧХ имеет разрыв непрерывности (рис. 8.10, а) Ке(юі) = f, при этом характеристическое уравнение системы будет иметь мнимый корень ?1 = ± гю1, т.е. в системе устанавливаются незатухающие гармонические колебания, если остальные корни левые.
Рис. 8.10 Различные виды ВЧХ:
а - с разрывами; б - с высоким острым углом
Высокий и острый пик ВЧХ, за которым Яе(ю) переходит через нуль при частоте близкой к Юі, соответствует медленно затухающим колебаниям (рис. 8.10, б).
6 Чтобы переходная характеристика имела перерегулирование ?< 18 %, ВЧХ должна
ЛІ
быть положительной невозрастающей функцией частоты, т.е. Яе(а) > 0,
Л]
Рис. 8.11 ВЧХ, соответствующая переходной xаpактеpистике с о< 18 %
7 Условия монотонного протекания переходного процесса.
Чтобы переходной процесс имел монотонный характер, достаточно, чтобы соответствующая, ему ВЧХ5е(а) являлась положитель-
Рис. 8.12 Условия монотонного протекания переходного процесса:
а - ВЧХ; б - переходной процесс
ной, непрерывной функцией частоты с отрицательной, убывающей, по абсолютной величине производной (рис. 8.12) 5е(а>) > О,
21}
< О.
8 Определение наибольшего значения перерегулирования ?тах переходного процесса по максимуму ВЧХ (рис. 8.13)
21\
(8.21)
где Кетах - максимальное значение; Re(0) - начальное значение.
 |
| Рис. 8.13 К определению наибольшего значения перерегулирования |
9 Если ВЧХ близка к трапецеидальной, т.е. может быть аппроксимирована трапецией с диапазоном частот 0 - z2 и коэффициентом наклона % =

переходного процесса системы заключено в пределах
 |
| Рис. 8.14 Аппроксимация ВЧХ трапецией |
При анализе устойчивости и качества автоматических систем предполагалось, что значения параметров объекта и управляющего устройства остаются в процессе эксплуатации системы постоянными. В действительности же параметры системы постоянно изменяются по разным причинам, это так называемое, эксплуатационное изменение. Кроме того, значения параметров могут иметь разброс вследствие допусков на изготовление и текущие значения переменных отличаются от расчетных. В связи с этим возникает задача определения влияния разброса и изменения параметров системы на статические и динамические свойства процесса управления.
Влияния вариаций параметров системы на ее статические и динамические свойства называются параметрическими возмущениями, а возникающие при этом отклонения характеристик системы от расчетных значений - параметрическими погрешностями (ошибками).
Для оценки степени влияния разброса и изменения параметров системы используют понятие - чувствительность системы. Чувствительность - это свойство системы изменять свои выходные переменные и показатели качества при отклонении того или иного ее параметра от исходного или расчетного значения. Для обозначения противоположного свойства используется понятие "грубость" и системы, сохраняющие свои свойства при любых параметрических возмущениях, называются грубыми или робастными.
Количественными оценками чувствительности являются:
- функция чувствительности;
- коэффициент чувствительности.
Функцией чувствительности называется частная производная какой-либо динамической характеристики или какого-либо показателя по изменяющемуся (варьируемому) параметру
к. Например, для передаточной функции W(s, к), зависящей от параметра к, функция чувствительности определяется как
ЛІ
(8.26)
для переходной функции K(W, кі) по отношению к параметру kL:
(8.27)
где кі0 - расчетное значение параметра к.
На практике часто используют относительную функцию чувствительности, которая соответственно для (8.26), (8.27) запишется:
ЛІ
лі
Так, для одноконтурной системы автоматического регулирования, состоящей из объекта Гоб(?) = ко| |(.?) и регулятора Wp(s), относительная функция чувствительности по отношению к параметру ко определяется соотношениемс учетом (5.86) оно преобразуется к виду
(8.28)
которое означает, что чувствительность типовой системы регулирования к изменениям свойств объекта полностью определяется только передаточной функцией разомкнутой системы. Чем меньше значение функции чувствительности, т.е. чем грубее система, тем меньше допол-нительное отклонение выходной переменной и, следовательно, лучше качество системы.
Если функция чувствительности выражается числом, то она называется коэффициентом чувствительности. С помощью коэффициента чувствительности оценивается чувствительность числовых показателей качества, например, показателя колебательности, перерегулирование. Оценка изменения хода процесса по отношению к возмущению производится по формуле 'y(t) = VJ(t)'k.
По отношению к нескольким параметрическим возмущениям применяют принцип суперпозиции, который можно проиллюстрировать следующим примером.
Пусть система управления описывается дифференциальным уравнением первого порядка
| Ty'(t) + y(t) = k o(t) или |  |

Vi (t) =
Если продифференцировать исходное уравнение по параметрам k и T

и произвести в полученных выражениях замену через функции чувствительности, то получают уравнения чувствительности рассматриваемой системы:
Определив |_| и _|, можно найти изменение хода процесса управления за счет
изменения параметров N и Т:
Ау(0 = I |AN +1 |АТ.
Функции чувствительности применяют для проектирования системы с наименьшим изменением качественных показателей при отклонении значений параметров системы от расчетной.
8.4 ПОНЯТИЕ ОБ УПРАВЛЯЕМОСТИ И НАБЛЮДАЕМОСТИ ОБЪЕКТА
При проектировании систем управления необходимо предварительно оценивать такие структурные свойства объектов как управляемость и наблюдаемость.
Объект называется полностью управляемым, если его с помощью некоторого ограниченного управляющего воздействия можно перевести в течение конечного интервала времени из любого начального состояния в заданное конечное состояние. Для осуществления такого перевода объекта необходимо, но не достаточно, чтобы каждая из координат состояния зависела хотя бы от одной из составляющих управляющего воздействия.
Линейный стационарный объект называется полностью наблюдаемым, если по результатам наблюдения (измерения или измерения и вычисления) выходных координат можно определить (восстановить) предыдущие значения координат состояния. Для полной наблюдаемости или восстанавливаемости объекта необходимо (но не достаточно), чтобы каждая координата состояния была связана по меньшей мере с одним из наблюдаемых сигналов.
8.5 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 Наряду с проблемой устойчивости при синтезе систем автоматического регулирования является проблема качества регулирования, характеризующая точность и плавность протекания переходного процесса. Для оценки качества регулирования в количественной форме используются показатели качества, которые подразделяются на прямые, косвенные, частотные, интегральные.
: Какие показатели качества называются прямыми и почему?
В Какой из косвенных показателей качества регулирования используют для оценки качества колебательных переходных процессов?
С Что является положительным фактом использования интегральных критериев качества регулирования?
2 В инженерной практике широко используются частотные методы исследования систем управления, которые позволяют оценить качество регулирования по вещественным частотным характеристикам.
: Если ВЧХ представлена суммой, то что представляет собой переходный процесс"
В Если ВЧХ по оси координат увеличили в а раз, то как поведет себя переходный процесс?
С Как определить начальное и конечное значения переходного процесса?
8.6 ТЕСТ
1 Какой показатель относится к группе прямых показателей качества регулирования?
: Степень устойчивости.
В Время регулирования.
С Начальное отклонение.
2 Какой показатель качества называется статической ошибкой?
: Максимальное отклонение от заданного значения.
В Отклонение от заданного значения в установившемся состоянии.
С Разность между максимальным и минимальным значениями переходного процесса.
3 Степень затухания определяется как...

где \і, \2, \з - амплитуды выходных колебаний.
4 Если к - степень устойчивости, то время регулирования апериодических переходных процессов определяется как.


5 Оценка статической ошибки может быть получена как.

В С
6 Интегральный квадратичный критерий качества регулирования - это .

В - = ] у 2(W )df,.
с
7 При анализе переходного процесса с помощью ВЧХ необходимо привести в соответствие масштабы по оси координат. Если ВЧХ увеличилась в а раз, т.е. стала aRe(z), то переходный процесс...
: Увеличится в а раз - a y(W);
В Уменьшится в а раз -
С Сожмется в а раз -
8 Условием монотонности протекания переходного процесса является. : Re(z) > 0;
В Re(z) > 0;
9 СИНТЕЗ СИСТЕМ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
9.1 ЗАДАЧИ СИНТЕЗА
Рассмотренные выше задачи относятся к задачам анализа автоматических систем. Задачи синтеза можно рассматривать как обратные задачам анализа. Они подразделяются на два вида: во-первых, требуется определить структуру, во-вторых, параметры системы по заданным показателям качества.
Синтез является важнейшим этапом проектирования и конструирования систем, основным и наиболее важным приложением результатов, полученных теорией автоматического управления. При решении задачи полного синтеза необходимо определить алгоритмическую и функциональную структуры системы.
Алгоритмическую структуру системы находят при помощи математических методов на основании требований, записанных в математической форме. В связи с этим процедуру отыскания алгоритмической структуры называют теоретическим синтезом или аналитическим конструированием системы управления.
Синтез функциональной структуры заключается в выборе конкретных элементов системы и согласовании их характеристик. Этот этап проектирования не имеет пока строгой математической основы и относится к области инженерного искусства. Последовательность решения задач полного синтеза может быть различной.
В простых случаях задачу иногда удается решить с методологической точки зрения в идеальной последовательности. При проектировании сложных промышленных систем управления применить такую последовательность, как правило, оказывается невозможно, поэтому в большинстве случаев задачу синтеза решают следующим образом.
Вначале, исходя из требований назначения системы и учитывая условия ее работы, по каталогам серийного оборудования выбирают функционально необходимые элементы: регулирующий орган, исполнительное устройство, датчики, которые вместе с объектом управления образуют неизменную часть системы. Затем на основании требований к статическим и динамическим свойствам системы определяют ее изменяемую часть, алгоритмическая структура которой находится с учетом свойств выбранных функционально необходимых элементов. Техническая же реализация осуществляется с использованием стандартных унифицированных регуляторов и различных корректирующих и компенсирующих устройств. Процессы определения алгоритмической и функциональной структур системы управления тесно переплетаются между собой, их приходится выполнять по несколько раз. Окончательное решение о структуре системы принимается на основе компромисса между точностью и качеством работы системы, с одной стороны, и простотой и надежностью - с другой.
Заключительным этапом проектирования системы управления является расчет настроечных параметров выбранного регулятора. В разделе 7 отмечалось, что под синтезом устойчивых систем понималось определение параметров настроек регуляторов при известной структуре. Ниже приводятся методы расчета настроечных параметров для одноконтурной системы автоматического управления.
В настоящее время разработано много методов расчета настроек регулятора, одни из них являются более точными, но трудоемкими, другие - простыми, но приближенными. Во всех
методах необходимо обеспечить процесс регулирования, как правило, удовлетворяющий двум выбранным критериям, один из которых позволяет обеспечить заданный запас устойчивости, а второй - обеспечить качество регулирования.
9.2 ВЫБОР ОПТИМАЛЬНЫХ НАСТРОЕК РЕГУЛЯТОРОВ МЕТОДОМ НЕЗАТУХАЮЩИХ КОЛЕБАНИЙ
Метод незатухающих колебаний, предложенный учеными Циглером и Никольсом, является приближенным методом определения оптимальных настроек регуляторов, обеспечивающим необходимый запас устойчивости, некоторую степень затухания и небольшую динамическую ошибку.
Расчет регуляторов с одним параметром настройки производится в один этап и основывается на расчете критического значения настройки пропорциональной составляющей, при которой АСР будет находиться на границе устойчивости. Уравнение для расчета этой настройки выводится из критерия устойчивости Найквиста, чтобы обеспечить запас устойчивости. Для некоторого значения частоты юкр должно выполняться соотношение
:р.С.(^'®кр) 1.
Таким образом, П-регулятор рассчитывается по обычным частотным характеристикам объекта. Уравнения для расчета критических значений настройки 6ікр и частоты юкр имеют вид:
| фоб(®кр) S; | |
| ікр' |  |
(9.2)
Оптимальная настройка П-регулятора:
6іопт= 0,55 6ікр. (9.3)
Расчет регуляторов с двумя и более параметрами настройки производится в два этапа: на первом - определяется критическое значение пропорциональной составляющей; на втором -обеспечивается степень затухания \ = 0,8 ... 0,9.
Оптимальные настройки регуляторов находят по следующим формулам:
- ПИ-регулятор
(9.4)
6іопт = 0,45 5ікР ;
6оопт = 0,0866ікрЮкр;
- ПИД-регулятор 6іопт = 0,6 6ікр;
6оопт =0,192SlKp«Kp;
(9.5)
| 0,471 |  |
9.3 АЛГОРИТМ РАСЧЕТА ОБЛАСТИ НАСТРОЕК ТИПОВЫХ РЕГУЛЯТОРОВ МЕТОДОМ РАФХ
Метод расширенных частотных характеристик описан в разделе 7 и использован при синтезе систем с заданным запасом устойчивости.
Методика расчета оптимальных настроек регуляторов методом РАФХ аналогична. Под оптимальными настройками в данном методе понимают настройки регулятора, обеспечивающие заданную степень колебательности рзад процесса регулирования при минимуме интегрального квадратичного критерия —кв. В связи с этим расчет настроечных параметров регулятора распадается на два этапа: определение настроек, обеспечивающих заданный запас устойчивости - заданную степень колебательности, и определение настроек, обеспечивающих качество регулирования, оцениваемое по интегральному квадратичному критерию.
Первый этап подробно описан в разделе 7. Расчет регуляторов с одним настроечным параметром (П- и И-регуляторы) выполняется в один (первый) этап. Для регуляторов с двумя настроечными параметрами на первом этапе рассчитывается линия равной степени колебательности в плоскости параметров настроек 60, 61. На втором этапе необходимо выбрать только одну пару настроек 60опт, 61опт, соответствующую минимальному значению интегрального квадратичного критерия качества. Расчет этого критерия для различных процессов регулирования показывает, что его минимуму для ПИ-регулятора соответствует точка на кривой равной степени колебательности, расположенная несколько правее вершины (рис. 9.1, а). Такой точкой является точка 3. Разным точкам на кривой равной степени
 |
|
Рис. 9.1 Выбор оптимальных настроек ПИ-регулятора: а - кривая равной степени колебательности; [ - графики переходных процессов регулирования для различных настроек ПИ регулятора |
видно, что с точки зрения заданного качества регулирования переходный процесс в точке 3 лучше, чем в точке 2. Так как при движении вдоль кривой равной степени колебательности пропорциональная составляющая возрастает, возрастает рабочая частота, следовательно, уменьшается динамическая ошибка регулирования, но с некоторого момента (точка 2) начинает уменьшаться и величина настройки интегральной составляющей 60, которая определяет скорость устранения статической ошибки. Чем меньше величина 60 , тем медленнее выбирается статическая ошибка, т.е. наблюдается затягивание "хвоста"
193
переходного процесса (точка 4). В точке 5 отсутствует интегральная составляющая, регулятор работает как пропорциональный, его особенностью является наличие статической ошибки регулирования.
Оптимальные настройки регулятора | | и | | рассчитываются по минимуму —кв. Для
их выбора необходимо рассчитывать критерий —кв для всех пар настроек регулятора вдоль кривой равной степени колебательности. Эта процедура трудоемка и на практике прибегают к инженерной методике определения местонахождения точки 3. Рабочая частота определяется, исходя из соотношений
Юр = 1,2 Юо или юр # 0,8 юп,
где ю0 - частота, соответствующая вершине кривой т = тзад; юп - частота,
соответствующая пропорциональному закону регу-лирования. После этого по формулам (7.18) рассчитываются | |, | |.
Процедура расчета оптимальных параметров настроек ПД-регу-лятора аналогична расчету ПИ-регулятора. В плоскости параметров S1 и S2 строится кривая заданной степени колебательности (рис. 9.2, а). При движении вдоль кривой вправо увеличивается дифференцио-нальная составляющая S2 и частота. Следовательно, чем больше S2, тем меньше динамическая ошибка регулирования. Величина настройки, пропорциональная составляющей 61, сначала увеличивается, а затем уменьшается, причем, чем больше S2, тем меньше статическая ошибка. Вышесказанное хорошо иллюстрируется графиками процессов регули-рования для различных настроек регуляторов, изображенных на рис. 9.2, [.
 |
|
Рис. 9.2 Выбор оптимальных настроек ПД-регулятора: а - линия равной степени колебательности; [ - графики процессов регулирования для различных настроек ПД-регулятора |
9.4 ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД СИНТЕЗА СИСТЕМ
Рассматриваемый метод относится к группе графоаналитических методов, разработанных В. Я. Ротачем, в основу которого заложены следующие положения.
Во-первых, считается, что система регулирования обладает необходимым запасом устойчивости, если ее показатель колебательности не превышает величины М = 1,1 ... 1,6, т.е. одним из критериев оптимальности является обеспечение заданного показателя колебательности Мзад.
Во-вторых, линейную систему регулирования можно рассматривать как своеобразный частотный фильтр, через который проходят составляющие гармоники входных воздействий.
В зависимости от динамических свойств АСР гармоники с различными частотами претерпевают различные изменения, т.е. амплитуда и фаза выходного сигнала будут другие, чем на входе.
Идеальной системой регулирования считается система, обладающая абсолютными фильтрующими свойствами. Амплитудно-частотная характеристика такой системы относительно возмущающих воздействий равна нулю во всем диапазоне частот от 0 f, а относительно управляющего воздействия она равна 1, т.е. Мв(щ) = 0; Му(щ) = 1.
Задача выбора оптимальных параметров настроек системы заключается в том, чтобы в наибольшей степени приблизить АЧХ реальной системы к АХЧ идеальной системы. Так как в реальных системах практически невозможно добиться, чтобы выполнялось условие Мв(щ)
= 0, то параметры настройки должны выбираться таким образом, чтобы система наиболее интенсивно фильтровала "опасные" гармоники. Так как производственные объекты являются низкочастотным фильтром, то целесообразно выбрать такой метод, который гарантировал бы наилучшее приближение частотных характеристик системы в окрестности точки с нулевой частотой. Приближение реальной системы к идеальной осуществляется путем разложения в ряд Тейлора. Условие оптимальности можно записать в виде:
- относительно возмущающего воздействия
(9.6)
(9.7)
Мв(0) = 0;
- относительно управляющего воздействия
Му(0) = 1;
Уравнения (9.6), (9.7) служат для определения оптимальных параметров настроек системы. Расчет проводится в следующем порядке.
1 В пространстве параметров настроек регулятора определяется граница области, в которой система обладает достаточным запасом устойчивости.
2 В этой области определяется точка, удовлетворяющая минимуму отклонения частотныіх характеристик реальной системыі от характеристик идеальной.
Исходными данныіми являются частотныіе характеристики объекта, в частности, амплитудно-фазовая.
Для построения границыі заданного запаса устойчивости используется следующий подход. Как известно, запас устойчивости может определяться двумя числовыми величинами: запасом устойчивости по модулю и запасом устойчивости по фазе, характеризующими степень удаления АФХразомкнутой системыі от "опасной" точки (-1, ІО). Но оказыівается, что степень удаления АФХ разомкнутой системыі от точки (-1, ІО) может быть определена по величине максимума амплитудно-частотной характеристики замкнутой системыі (см. 7.3.2).
Таким образом, требование, чтобы максимум АЧХ замкнутой системы не превышал некоторой заранее заданной величины, сводится к требованию, чтобы АФХ разомкнутой системы не заходила внутрь области, ограниченной радиусом г и с центром на расстоянии R от начала координат, расположенной на отрицательной вещественной полуоси.
После определения области заданного запаса устойчивости производится определение точки в этой области, соответствующей оптимальным настройкам регулятора.
9.4.1 П-регулятор
Передаточная функция П-регулятора записывается в виде
W(s) = кр.
П-регулятором:
Амплитудно-фазовая характеристика разомкнутой системы с
Wp.c.(rn) = кр Гоб (ію).
| Определение оптимальной настройки кр производится в следующем порядке |
 |
| Рис. 9.3 К определению значения коэффициента передачи П-регулятора |

(9.8)
к отрицательной вещественной полуоси.
Вычерчивается окружность с центром на вещественной отрицательной полуоси, касающаяся одновременно АФХ объекта и этого луча:
(9.9)
В большинстве случаев расчет систем автоматического регулирования проводится на обеспечение показателя колебательности М = 1,62, что гарантирует запас устойчивости по модулю G = 0,38 и по фазе у = 36°, а степень затухания переходного процесса в коле-ательном звене Мзх(0) =1: у = 0,9. В соответствии с этим формулы (9.8) и (9.9) принимают вид _
|~х|
(9.10)
Найденное значение коэффициента передачи является оптимальным значением.
9.4.2 И-регулятор
Передаточная функция И-регулятора:
Амплитудно-фазовая характеристика разомкнутой системы:
1 По АФХ регулируемого объекта строится АФХ разомкнутой системы для кр = 1 и некоторого значения постоянной времени Тр, величина которой выбирается любой, удобной для построения характеристики:_
Последнюю удобно строить, поворачивая каждый вектор АФХ объекта на угол 90° по часовой стрелке и уменьшая его длину в Тр z раз (рис. 9.4).
2 Проводится линия под углом E к отрицательной вещественной полуоси и вычерчивается окружность с центром, расположенным на этой оси, касающаяся одновременно построенной линии и АФХ :р.с1(гю). Величина коэффициента передачи кр, обеспечивающая заданную величину максимума АЧХ замкнутой системы (заданный показатель колебательности Мзад определяется по формуле (9.9)), и, следовательно, величина предельного коэффициента передачи И-регулятора, которая является и его оптимальным значением, определяется как
(9.11)


 |
|
Рис. 9.4 Определение предельного коэффициента передачи И-регулятора Расчет П-регулятора производится в два этапа: |

Если
(9.12)
9.4.3 ПИ-регулятор
Передаточная функция ПИ-регулятора:
Амплитудно-фазовая характеристика разомкнутой системы:
Расчет ПИ-регулятора производится в следующем порядке:
1 Строится семейство АФХ разомкнутой системы при кр = 1 и некоторых различных значениях времени изодрома Ти/ (/ = 1, 2, 3, ...), выбираемых произвольно, но с точки зрения удобства построения:
 |
| Рис. 9.5 К определению коэффициентов передачи |
Для определения границы области устойчивости ПИ-регулятора первоначально вычерчивается АФХ объекта W(iz), которую достаточно иметь в пределах Ш квадранта комплексной плоскости :(рис. 9.5).
На этой характеристике выбираются точки А1, А2, А3, ... с частотами юц ю2, ю3, ..., которые соединяются с началом координат отрезками ОА1, ОА2, ОА3, ... . К этим отрезкам в точках А1, А2, А3, ... восстанавливаются перпендикуляры. Далее определяются положения точек В/ АФХ разомкнутой системы. С этой целью на восстановленных перпендикулярах откладываются
ОА
отрезки А/В/, определяемые, как А -% - = . Соединяя точки Bj с временем изодрома Ти/
ю УТП/
плавной кривой, получают АФХ разомкнутой системы. Аналогичным образом строятся АФХ разомкнутой системы для других значений Ти/.
2 Проводится, линия под углом E к вещественной отрицательной полуоси и строятся окружности с центром на этой оси, касающиеся АФХ разомкнутой системы для различных Тиі и этой прямой. Для каждого значения Ти1 определяется предельное значение коэффициента передачи

если М = 1,62, то Р = 38°, кр/ = - .
и/
3 В плоскости параметров настроек кр - Ти строится граница области, в которой максимум АЧХ замкнутой системы относительно управляющего воздействия не
превышает заданной величины. С этой целью используются полученные данные Ти0 (рис.
 |
| Рис. 9.6 Определение оптимальной настройки ПИ-регулятора |
Оптимальным настройкам регулятора соответствует точка, для которой отношение
будет максимальной, так как именно в ней выполняется условие (9.7). Такой точкой является точка касания касательной к границе области допустимого запаса устойчивости, проведенной через начало координат. Действительно, любая другая прямая, выходящая из
начала координат с большим отношением
, которое определяет угловой коэффициент, не
будет проходить через область допустимого запаса устойчивости, и поэтому получить большую величину отношения в данной системе невозможно без уменьшения ее устойчивости ниже необходимой величины.
9.5 ТРЕНИРОВОЧНЫЕ ЗАДАНИЯ
1 Важнейшим этапом проектирования и конструирования систем является синтез, когда необходимо определить алгоритмическую и функциональную структуру. Если структура известна, то синтез сводится к определению параметров настроек регуляторов. Все методы расчета последних подразделяются на точные, но трудоемкие и простые, но приближенные. Наиболее распространенными являются метод незатухающих колебаний, метод РАФХ и графоаналитический метод.
А В чем заключается синтез функциональной структуры"
В Какие методы расчета параметров настроек регуляторов относятся к точным методам?
С Как называется синтез, заключающийся в расчете параметров настроек регуляторов?
2 Одним из точных методов расчета параметров настроек регуляторов является метод РАФХ, основанный на аналоге критерия Найквиста. Расчет распадается на два этапа: определение настроек, обеспечивающих заданный запас устойчивости, и определение настроек, обеспечивающих качество регулирования.
А Какие параметры настроек регуляторов называются оптимальными согласно методу РАФХ?
В Каким показателем оценивается качество регулирования в методе РАФХ?
С Как выбираются оптимальные настройки в методе РАФХ для регуляторов с двумя настроечными параметрами?
3 Вторым точным методом расчета оптимальных настроек регулятора является графоаналитический метод, основанный на использовании АФХ регулируемого объекта.
А Каким показателем оценивается запас устойчивости в графоаналитическом методе?
В Как в графоаналитическом методе оценивается качество регулирования? С Как определить оптимальные настройки ПИ-регулятора?
9.6 ТЕСТ
1 Выбор алгоритмической структуры системы автоматического регулирования заключается в выборе...
: Функциональных элементов и их характеристик.
В Структуры системы автоматического регулирования.
С Параметров настроек типовых регуляторов.
2 Выбор оптимальных настроек регуляторов методом незатухающих колебаний относят
к.
: Точным методам.
В Случайным методам.
С Приближенным методам.
3 При выборе оптимальных настроек ПИ-регулятора рабочая частота определяется как.
: Юр = 0,8 юп.
В юр = Юп.
С Юр 1,2 Юп,
где юп - частота, соответствующая пропорциональному закону регулирования.
4 Точка, соответствующая оптимальным настройкам ПД-регулятора,
расположена на кривой заданной степени колебательности в плоскости параметров настройки регулятора 62 - 61:
: Слева от максимума.
В В вершине.
С Справа от максимума.
5 Каким интегральным критерием оценивается качество регулирования в методе РАФХ расчета оптимальных параметров настроек регуляторов?
: Линейным интегральным критерием.
В Модульным интегральным критерием.
С Квадратичным интегральным критерием.
6 Из скольких этапов складывается расчет оптимальных параметров настроек регуляторов для ПИ- и ПД-регуляторов?
: Из одного.
В Из двух.
С Из трех.
7 В графоаналитическом методе расчета оптимальных параметров настроек регуляторов считается, что обеспечен заданный запас устойчивости, если АФХ разомкнутой системы и с центром на отрицательной вещественной полуоси
окружность радиуса
: Пересекаются.
В Касаются.
С Не заходят друг на друга.
8 При каком значении коэффициента передачи Кп, который не известен, строится АФХ разомкнутой системы?
: Кп = 0.
В Кп = 1.
С Кп = Коб.
9 Если показатель колебательности М = 1,62, то коэффициент передачи равен... : Кп = 1/г.
В Кп = г.
С Кп = 1/г + 1.
10 При расчете оптимальных настроек параметров И-регулятора постоянная времени Тр выбирается.
: Тр = 1.
В Произвольно.
С Тр = Тоб.
10 РЕШЕНИЕ ТРЕНИРОВОЧНЫХ ЗАДАНИИ
Раздел 1
1 А Совокупность технических средств, выполняющих некоторый процесс, называется
объектом управления. Примером объекта управления, например, является процесс ректификации, центрифуга и др.
В Входные переменные являются управляющими, если они служат для поддержания управляемой переменной в соответствии с некоторым законом управления.
С Переменная, которую необходимо поддерживать в соответствии с некоторым законом управления, называется управляемой.
2 А В АСР, изображенной на рис. 1.2, реализованы принципы регулирования по
отклонению и по возмущению.
В Если регулятор изменяет регулирующее воздействие при отклонении регулируемой переменной от заданного значения ('y(t) = y(t) - узад), то такое решение называется регулируемым по отклонению, 'y(t) называется отклонением или ошибкой управления. С Наиболее эффективной является комбинированная система регулирования.
3 А Линейная система относится к классу систем по основным видам уравнений динамики
процессов управления.
В Класс "характер функционирования" делится на:
а) системы стабилизации;
б) системы программного регулирования;
в) следящие системы;
г) системы оптимального управления;
д) адаптивные системы.
С Класс "характер подачи сигналов" подразделяется на:
а) непрерывные системы;
б) дискретные системы, в которых выделяют импульсные, релейные, цифровые.
Раздел 2
1 А Сигнал называется регулярным, если его математическим представлением является
заранее заданная функция времени.
В Существуют временное и частотное представления сигналов.
С К основным типам регулярных сигналов относятся: периодический, почти периодический и непериодический.
2 А Преобразованием Фурье называется оператор
0
В Характерными свойствами спектра периодического сигнала являются:а) спектры всегда дискретны, частоты основных гармоник кратны основной частоте;
б) чем больше период сигнала 7, тем "гуще" спектр; при Т o f получают непериодическую функцию;
в) с уменьшением длительности импульсов при постоянном периоде амплитуды гармоник уменьшаются, а спектр становится "гуще";
г) если с уменьшением длительности прямоугольных импульсов увеличивать
амплитуды по закону $о = 1/х, то их последовательность стремится к
последовательности дельта-функций, а амплитудный спектр - к постоянному для всех частот значению Ап = 1/L.
эиодической функции называется величина
С Спектральной характеристикой непе

где : - бесконечно малые амплитуды периодической функции.
3 : Дельта-функцией называется функция, удовлетворяющая условиям:
ЛІ
В Сигнал в виде единичного скачка на исследуемом объекте подают путем резкого открытия вентиля, чтобы расход подаваемого вещества изменялся скачком на единицу. С Гармонический сигнал характеризуется амплитудой, периодом и фазой.
Раздел 3
1 : Уравнениями статики называются уравнения, описывающие поведение системы
регулирования в установившемся режиме при постоянных воздействиях.
Статической характеристикой объекта (системы) называется зависимость выходной величины от входной в статическом режиме.
В Уравнениями динамики называются уравнения, описывающие поведение системы регулирования при неустановившемся режиме и произвольных входных воздействиях. С Гидравлический резервуар, электрическая емкость, непрерывный химический реактор полного перемешивания описываются обыкновенным дифференциальным уравнением с постоянными коэффициентами первого порядка.
2 : Для доказательства линейности системы проводят эксперимент, состоящий из трех
опытов:
1 опыт: на вход системы подается входной сигнал x1(t) и определяется выходная координата \1(t) в установившемся режиме;
2 опыт: на вход системы подается другой сигнал x2(t) и определяется координата \2(t);
3 опыт: на вход системы подается сигнал, равный сумме входных сигналов x3(t) = x1(t)
+ x2(t), и определяется выходная координата \3(t). Далее проверяется выполнение соответствия \3(t) = \1(t) + \2(t) для любого момента времени. Если оно
выполняется, то выполняется принцип суперпозиции, и система, следовательно, является линейной.
В Основными динамическими характеристиками, используемыми в теории
автоматического управления, являются: передаточная функция, дифференциальное уравнение, переходная функция, весовая функция, частотными характеристикими: амплитудно-фазовая, амплитудно-частотная, фазо-частотная, вещественно-частотная.
С Схема расчета динамики с помощью временных характеристик состоит из следующих этапов:
1) выбирается стандартный сигнал на входе v(t) = (v(t), ..., vn(t));
2) входной сигнал произвольной формы представляется как суперпозиция стандартных
сигналов x(t) = a1v(t) + a2v2(t) + + a nvn(t); _
3) определяется реакция системы на стандартные сигналы ;
4) выходной сигнал \(t) определяется как суперпозиция выходных сигналов \L(t):
3 : Преобразованием Лапласа называется преобразование функции x(t) переменной t в функцию х(?) другой переменной [] при помощи оператора
Основными свойствами преобразования Лапласа являются следующие:
а) теорема линейности ;
ЛІ
б) теорема подобия
в) теорема затухания
и др.
г) теорема запаздывания
В ЛІ .
С Передаточной функцией объекта называется отношение преобразованного по Лапласу выходного сигнала \(?) к преобразованному по Лапласу входному сигналу х(?) при нулевых начальных условиях.
Раздел 4
1 : Основными свойствами конформного отображения являются:
а) линия одной комплексной плоскости отображается в линию другой комплексной плоскости;
б) бесконечно малый угол отображается в такой же бесконечно малый угол, углы сохраняются;
в) треугольник одной комплексной плоскости отображается в такой же или подобный треугольник другой комплексной плоскости, направление обхода сохраняется;
г) внутренняя область одного треугольника преобразуется во внутреннюю область другого треугольника.
| В Re(z) = M(z) cos ф(ю); Іт(ю) = M(z) sin ф(м). | |||||
|
лі

Зесовая функция представляет собой обратное преобразование Фурье от АФХ юли h(t) - переходная функция, то W(iz) = (iz) h(iz).
Лі
Раздел 5
1 : Обыкновенными дифференциальными уравнениями описываются апериодическое звено первого порядка, апериодическое звено второго порядка, колебательное звено.
В У реальных звеньев АЧХ M(z) о 0 при z о f. У идеально-дифференцирующего звена M(z) о f при z о f, его неосуществимость также видна из временных характеристик, так как h(t) = 5(t), а w(t) = 5'(t).
С Типовые звенья подразделяются на:
а) статические, у которых статическая характеристика отлична от нуля;
б) дифференцирующие, у которых статическая характеристика равна нулю;
в) астатические, у которых статическая характеристика не существует.
2 : Для одноконтурной системы автоматического регулирования можно записать передаточные функции по каналу регулирования, по каналу возмущения, по каналу ошибки.
В При последовательном соединении:
При параллельном соединении: эез дополнительных преобразований производится перенос узла через узел и перенос сумматора через сумматор.
: Физически не реализуем Д-закон регулирования.
В Введение в закон регулирования дифференциальной составляющей увеличивает быстродействие регулятора.
С Знак у передаточных функций регулятора учитывает тот факт, что регулятор включается в систему по принципу отрицательной обратной связи.
Раздел 6
1 : Система, которая после снятия возмущения принимает новое состояние равновесия, отличное от первоначального, называется нейтральной.
В Система автоматического управления не устойчива, так как один из корней 64 положительный.
С Система автоматического регулирования, у которой корни характеристического уравнения расположены слева от мнимой оси, устойчива.
2 : Необходимое условие устойчивости является и достаточным для систем, описывающихся обыкновенными дифференциальными уравнениями первого и второго порядка.
В В соответствии с критерием Гурвица система устойчива: Ді = 4 > 0; Д2 = 5 > 0; Дз = 5 > 0.
С Для исследования устойчивости с помощью критерия Рауса необходимо располагать уравнением, которое описывает систему автоматического управления.
3 : Если разомкнутая система не устойчива, то для того, чтобы замкнутая система была устойчивой, необходимо и достаточно, чтобы АФХ разомкнутой системы охватывало точку (-1, L0) т/2 раз, где т - число правых корней характеристического уравнения разомкнутой системы.
В В соответствии с критерием Михайлова система автоматического управления не устойчива, так как корни не являются действительными чередующимися между собой.
С В соответствии с критерием Найквиста система устойчива, так как АФХ разомкнутой системы не охватывает точку (-1, ДО).
Раздел 7
: Синтез устойчивых систем базируется на критерии устойчивости Найквиста.
В Граница устойчивости для систем автоматического регулирования, с регуляторами, имеющими два настроенных параметра, строится в плоскости параметров настройки ?1 - ?0 (ПИ-ре-гулятор) или ?2 - ?1 (ПД-регулятор) по уравнению
или
соответственно.
С Задача синтеза систем регулирования с П- или И-регулятором решается однозначно, так как имеются два уравнения и два неизвестных щр и ?1 (или ?0).
2 : К корневым методам оценки запаса устойчивости относятся степень устойчивости и степень колебательности.
В Показатель колебательности - это максимум АЧХ замкнутой системы.
С Корневые оценки запаса устойчивости вводятся в рассмотрение через расширенные амплитудно-фазовые характеристики.
3 : Если запас устойчивости оценивается показателем колебательности М, то замкнутая система обладает заданным запасом устойчивости, если АФХ разомкнутой системы касается окружности радиуса г = М/(М2 - 1) с центром в точке I = М2/(М2 - 1).
В Задача определения настроек регуляторов ПИ и ПД на заданный запас устойчивости решается неоднозначно. Задача имеет бесконечное множество решений.
С Структурно-неустойчивыми называются системы, которые не могут стать устойчивыми ни при каких комбинациях значений их параметров.
1 : Прямыми показателями качества являются показатели, которые позволяют непосредственно по кривой переходного процесса оценивать качество регулирования. К ним относятся статическая ошибка регулирования, динамическая ошибка регулирования, время регулирования, перерегулирование, степень затухания.
В Для оценки качества регулирования колебательных переходных процессов используется степень колебательности.
С Положительным фактором использования интегральных критериев качества является получение общей оценки быстродействия и отклонения регулируемой величины от установившегося значения.
2 : Если ВЧХ представима суммой и каждой составляющей соответствует переходный процесс, то и переходный процесс представляется суммой составляющих.
В Если ВЧХ на оси ординат увеличивается в а раз, то и переходный процесс увеличивается в а раз.
С Конечное значение переходного процесса равно начальному значению ВЧХ; начальное значение переходного процесса равно конечному значению ВЧХ.
Раздел 9
1 : Синтез функциональной структуры заключается в выборе конкретных элементов и
согласовании их характеристик.
В К точным методам расчета параметров настроек регуляторов относятся метод РАФХ и графоаналитический метод.
С Расчет параметров настроек регуляторов называется параметрическим синтезом.
2 : Оптимальными параметрами настроек регуляторов согласно методу РАФХ являются
настройки, обеспечивающие заданную степень колебательности и минимум квадратного интегрального критерия.
В Качество регулирования в методе РАФХ оценивается квадратичным интегральным критерием.
С Для регуляторов с двумя настроечными параметрами оптимальным настройкам соответствует точка, лежащая на кривой заданной степени колебательности в плоскости настроечных параметров, в которой квадратичный интегральный критерий минимален.
3 : В графоаналитическом методе запас устойчивости оценивается показателем
колебательности.
В Качество регулирования в графоаналитическом методе оценивается с помощью критерия оптимальной фильтрации, заключающегося в наилучшем приближении АЧХ реальной системы к АЧХ идеальной системы на низких частотах и, в частности, при Z = 0. Условия оптимальности записываются в виде:
 |
| С Точка, соответствующая оптимальным настройкам ПИ-регу-лятора, находится в точке касания касательной, проведенной из начала координат к кривой заданного запаса |
СПИСОК ЛИТЕРАТУРЫ
1 Алексеев А. А., Имаев Д. X., Кузьмин Н. Н., Яковлев В. Б. Теория управления: Учебник. - СПб.: ЛЭТИ, 1999. 435 с.
2 Софиева Ю. Н., Софиев А. Э. Теория автоматического управления. М.: МИХМ, 1975. 165 с.
3 Сборник задач по теории автоматического регулирования и управления / Под ред. В. А. Бесекерского. М.: Наука, 1978. 512 с.
4 Теория автоматического управления. Ч. 1 / Под ред. А. А. Воронова. М.: Высшая школа, 1986. 367 с.
5 Теория автоматического управления. Ч. 2 / Под ред. А. А. Воронова. М.: Высшая школа, 1986. 504 с.
6 Первозванский А. А. Курс теории автоматического управления: Учебное пособие для вузов. М.: Наука, 1986. 616 с.
7 Лукас В. А. Теория автоматического управления. М.: Недра, 1990. 416 с.
8 Попов В. Л. Теория линейных систем регулирования и управления. М.: Наука, 1989. 304 с.
9 Ротач В. Я. Расчет динамики промышленных автоматических систем регулирования. М.: Энергия, 1973. 440 с.
10 Теория автоматического управления. Сборник задач и контрольных вопросов / Сост. Ю. Н. Софиева. М.: 1974. 92 с.
11 Фельдбаум А. А., Бутковский А. Г. Методы теории автоматического управления. М.: Наука, 1971. 744 с.
12 Ротач В. Я. Теория автоматического управления теплоэнергетическими процессами. М.: Энергоатомиздат, 1985. 296 с.
13 Дудников Е. Г. Основы автоматического регулирования тепловых процессов. М.: Госэнергоиздат, 1956 264 с.
14 Стефани Е. П. Основы расчета настроек регуляторов и теплоэнергетических процессов. М.: Энергоиздат, 1982. 352 с.
15 Попов Е. И Теория линейных систем автоматического регулирования и управления: Учебное пособие для втузов. М.: Наука, 1989. 389 с.
16 Теория автоматического управления. Ч. 1 / Под ред. А. В. Не-тушила. М.: Высшая школа, 1978. 424 с.
17 Теория автоматического управления. Ч. 2 / Под ред. А. В. Нетушила. М.: Высшая школа, 1972. 432с.